Viametris介绍车辆vMS3D
Viametris是移动扫描技术的领导者,它已经宣布推出其新的车辆移动扫描系统vMS3D。移动地图系统专用于户外、道路和城市地区,利用创新技术进行定位,不依赖于全球导航卫星系统接收器,全球导航卫星系统接收质量差不再是一个问题。
这项技术不再严格依赖全球导航卫星系统接收器。基于独特的技术和多年的室内移动扫描专业知识,Viametris已成为全球导航卫星系统环境中移动扫描领域的领先专家。移动地图系统允许快速测量,比任何其他技术都要快。但一个主要问题仍然存在:城市峡谷和全球导航卫星系统覆盖率低的地区会发生什么。多亏了后处理软件PPiMMS和使用同步定位和测绘(SLAM)技术改进的轨迹,Viametris解决了全球导航卫星系统覆盖率差或没有覆盖的问题。
定位和绘图
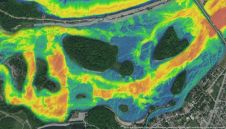
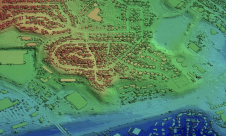
SLAM是一种为机器人行业开发的算法,但它显然可以应用于其他学科。该原理使用图像或基于激光雷达的定位来确定传感器和周围物体之间的距离。Viametris的总裁和创始人Jerome Ninot说,基于特征的SLAM使用角或特定形状来计算传感器的位置,但在没有特征来定位的区域,如陆地或开阔区域,这种方法是不够的。基于激光雷达的SLAM使用激光雷达点云中的所有点,并通过最小化帧与帧之间的差异来找到传感器的最佳位置。这种方法的优点是能够扫描任何类型的环境。此外,它更容易与其他方法合并,如集成imu或DMIs和地面控制点,以在不适合SLAM的地区获得更高的精度。
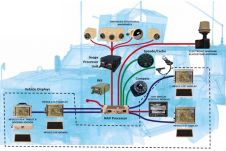
PPiMMS后处理软件管理来自系统的数据集。它的任务是计算、控制和改进轨道。当GNSS接收差时,用户可以手动添加GCPs来约束结果。但是,在大多数情况下,用户将能够使用GNSS后处理软件包括后处理的全球位置。此外,全景相机可以使用PPiMMS为点云着色。
vMS 3D设计用于任何条件下的勘测,包括GNSS信号差的城市峡谷、高速公路和高速公路、开放天空的大型区域、开放天空区域的施工现场以及最佳GNSS接收。
应用
- 传统土地测量:对已建成或施工进度的地形测量
- 自动驾驶汽车高级地图:知识道路数据库,以帮助机器人在道路上重新定位
- 测绘和导航:创建卡车或特殊车辆的路线,测量故障和定位POI
- 道路清单:道路特征的知识需要有效的工具来有效地收集它们