Viametris Brings SLAM to Vehicle Mounted Mapping with vMS3D
This article was originally published inGeomatics World.
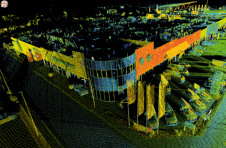
Viametris’ new vehicle-mounted mobile mapping system, the vMS3D, has come up with a solution for what do you do when mapping urban canyons, or other areas where GPS signals are not available by using a technology more common to indoor mappers: SLAM (simultaneous localization and mapping). Originally developed for robotics applications, SLAM uses sensor input to simultaneously map an environment and determine the sensor’s position within that environment.
该系统包括GNSS接收机、PointGrey LD5 30 megapixel camera, and a VLP-16 lidar sensor. According to Viametris president Jerome Ninot, the system uses the lidar sensor for its SLAM algorithms. As he explains it, the vMS3D takes “all points from the lidar point cloud and finds the best position of the sensor by minimizing the difference from frame to frame. The advantage of this approach is the ability to scan any type of environment.” He also notes that the resulting data is easier to integrate with data gathered using IMUs, DMIs, and ground control points, which can be very useful in areas where SLAM is not well suited.
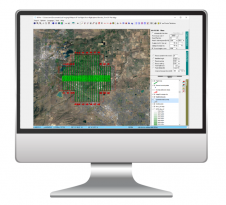
To manage and process the data from the system, Viametris offers the PPiMMS software. The software calculates and controls the trajectory of the mapping device using whatever information available. The software can also be used to manage ground-control points, though “in most cases the user will be able to include post processed global positions using GNSS post-processing software.”
Make your inbox more interesting.Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
Sign up for free