UAV地图新西兰海滩创建详细的3D模型
本文最初发表于测绘学的世界。
今年年初,在新西兰克利夫顿海滩发生的山体滑坡事故中,两名韩国游客被冲到海里,导致两人受伤。事件发生后,海滩被关闭,黑斯廷斯区议会进行了风险评估。测绘公司与该公司签订合同,提供由无人机(UAV或“drone”)收集的数据,以协助委员会做出有关进入Cape的公共安全决定。为了绘制悬崖表面的地图,他们使用了安装在无人机上的RTK GPS和PPK GPS装置的组合。
最初,验船师集中在评估游客受伤的主要岩石上,然后从Clifton Motor Camp的整个海岸线进行映射到Cape小斗篷的Gannet殖民地,以告知安理会的量化风险评估保护部。映射整个海滩的原因是具有高度准确的3D模型,可以作为未来监控和岩石事件分析的基线。此数据是必要的,以便确定海滩是否能够安全地访问。
结合RTK GPS和PPK GPS
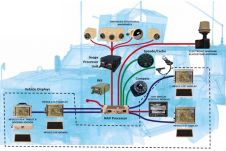
调查者们决定选择将RTK GPS和PPK GPS组合安装在无人机上。测量公司团队通过在本地区域定位和测量调查标志,将每个无人机调查连接到现有的调查网络。然后将GPS基站设置为在每个UAV飞行的持续时间内记录原始GPS数据。
海滩的访问需要预先规划,因为海滩只有在退潮期间通过4WD进入,给我们大约三个小时的窗口时间。小潮严重缩短了团队在海滩上的时间,有一次工作回来的时候,有一些惊险的时刻!太阳的位置也必须正确,才能提供高质量的摄影。

没有视线
每次飞行前,在海滩上标记检查点和控制点,并用RTK GPS进行测量。一旦数据经过处理,这些程序就有助于验证数据。这些痕迹是暂时的(无毒喷漆),随着下一次涨潮而消失。测量员不能在海滩上留下永久的标记。拥有高精度的机载PPK GPS系统是必须的,因为没有进入海滩上的悬崖,而且无法看到基站,消除了无人机上RTK GPS的使用。
为了使绘制过程更容易,海滩被分割成1公里长的区域。每个扇区都有一系列的航班,在办公室里手工设计,符合自然地形。在整个项目中,保持相对稳定的距离以提供高分辨率的图像。当无人机在空中时,它会定期记录图像,同时确保图像的高度重叠,最后提供一个完整的数据集。
无人机飞行每一个计划的飞行完美无缺,尽管悬崖阴影一半的卫星,特别是在低飞行高度,PPK GPS系统给每个照片位置一个固定的解决方案。
(照片后的文本)

回到办公室
回到办公室后,数据被下载下来,调查测量也减少了。每张照片的坐标精确到+/-30mm。
将图像、照片坐标和相机校准参数输入Pix4d进行处理。Pix4d为每张图像生成关键点,然后将相邻的图像相互匹配,最终将所有图像拼接成一个块。
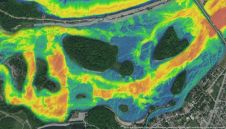
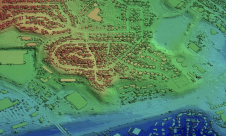
然后,在海滩上标记的船员的控制点在照片中发现,并将测量的坐标与计算的坐标进行比较以验证精度。当验船师对准确性感到满意时,他们开始产生点云(高达每公里的海滩2500万积分),3D模型,Orthoplane和Orthophoto图像。同样,每个扇区重复该过程。
以下是处理如何运作的简短视频,以主要岩石为例。
以获得最终结果,如这个视频,所有9个项目都合并在一起,并生成3D模型。收集的数据量是巨大的,PC花了4周连续工作,以便将其全部纳入其中。结果是值得的。

项目统计数据:
-超过12,500张照片,每一张都定位在+/- 30mm
- 超过155公里的无人机航班
- 距离映射超过9.5公里
-悬崖表面高达140米以上
2D精度低于15mm
3D精度低于22mm
-整个工作的平均GSD /分辨率约为2.38cm/像素
设备:
- DJI matrix 200配备X4S摄像头
- Leica GS16 / GS18 RTK GPS
-Pix4D处理数据
确认
感谢测量公司与GIM国际分享这个故事。188金宝搏特邀