
点云:摄影测量还是激光雷达?
摄影测量或激光雷达点云-两者都有其优点,而哪一个最适合取决于特定的应用。摄影测量与激光雷达有一个区别,即RGB。摄影测量点云有每个点的RGB值,从而产生彩色点云。另一方面,在精确度方面,激光雷达是很难被打败的。但并不是所有的项目都要求相同的准确性,这就是为什么在你决定哪种方法最适合你之前,最好先做一些研究。采集时间和处理时间是应该考虑的其他问题。在188金宝搏特邀,我们选择了一系列文章来更多地解释点云。本系列将让您深入了解点云数据的世界,这些数据要么来自摄影测量学,要么来自激光雷达,要么来自两者的结合。
比较激光雷达和摄影测量点云
机载激光雷达和摄影测量都是捕捉点云的可行方法,为人工硬结构的三维建模。虽然这两种方法都产生点云,但捕获数据的方式在许多方面不同,导致点云具有不同的特征。在本文中,作者评估了激光雷达和摄影测量点云从无人机载系统捕获的检查防洪结构。继续阅读…
OBIA和点云
基于目标的图像分析(OBIA)是为了提高传统的基于像素的多光谱图像分类的精度而发展起来的。OBIA于2000年前后推出,并在各种软件包(如recognition)中实施,已成功应用于土地覆盖、森林和农业地区的测绘。如今,不仅可以获得高分辨率的多光谱图像,而且机载激光雷达捕捉到的高密度3D点云也越来越多。OBIA是否也适合激光雷达点云的半自动分类?阅读更多关于有希望的前景。继续阅读…
面向未来的海量点云数据存储
点云数据集已经被证明对从工程设计到资产管理的许多应用程序都很有用。随着点云变得越来越密集和精确,新的软件允许越来越多的用户使用这些数据集。然而,由于点云的规模和对专用工具的依赖,点云的数据管理仍然很复杂。数据管理器的一个主要考虑因素是点云存储格式的选择,因为有几种不同的格式可供选择。继续阅读…
克服目前稠密点云的瓶颈
NUBIGON是一家初创公司,在土耳其和奥地利设有办事处,开发了强大的现实捕捉软件。该公司的解决方案可以实时、全高清地可视化激光雷达和摄影测量点云,同时保持许多从事点云工作的专业人士所需要的精确精度。188金宝搏特邀为了了解更多,我们决定采访公司雄心勃勃的创始人兼首席软件开发人员穆拉特·阿里坎。继续阅读…
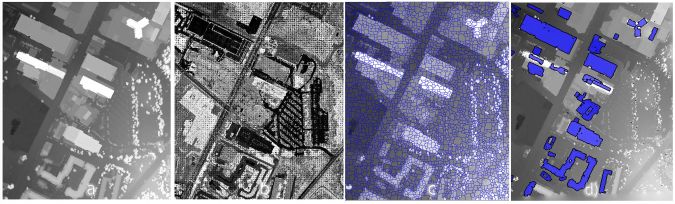
从点云和图像分类建筑物
建筑物轮廓的重建为土地信息系统提供了有用的输入。在希腊北部的一个城市,33公顷的商业和住宅混合区域被选为测试区域,以评估建筑的分类。有两个数据来源:机载激光雷达和航空照片。对这些数据源进行处理以创建两个独立的点云。对比结果表明,两种数据源均可用于建筑物分类,但在提高密集图像匹配的鲁棒性方面还需进一步改进。继续阅读…
点云的极点
目前,由于噪声、杂波、遮挡和点密度变化等因素的影响,从城市站点的点云中提取物体通常是人工完成的。本文作者开发了一个基于开源点云库的自动检测路标、灯柱、电线杆、交通灯等杆状物体的软件工具。结果似乎令人鼓舞。继续阅读…

智能手机上的点云
智能手机无处不在,许多人再也离不开它。智能手机相机捕捉的图像适合生成点云和3D模型。在智能手机上运行的应用程序和在远程服务器上运行的软件可以从多个图像中轻松建立3D模型。现在的挑战是训练和指导外行人使用智能手机进行正确的图像捕捉策略。本文作者研究了智能手机的潜在用途,利用一种协作的方法,廉价而快速地生成点云和3D模型。继续阅读…











