
新闻
NavVis使用SLAM自动删除点云工件
本文最初发表于测绘学的世界.
NavVis是全球领先的企业室内空间智能解决方案提供商,近日发布了一款针对NavVis M6室内移动地图系统(IMMS)的新软件,该系统可以在扫描数据的后处理过程中自动检测和移除点云中的动态物体和物体边缘点。
条纹点和动态物体是影响所有三维激光扫描设备的两种常见的点云伪影。当激光束击中物体的边缘和背景时,条纹点就会出现。这束散射的光束最终出现在点云中物体边缘的所谓边缘。第二种类型的点云伪影是在激光扫描仪捕获动态对象(比如通过扫描的人),然后作为伪影出现在点云中时产生的。
后处理算法
的NavVis M6IMMS是一个基于同步定位和测绘(SLAM)的系统,使用激光扫描仪捕捉环境中的大量测量点。由于基于slam的移动地图系统在扫描环境时通过环境移动,对象可以从多个角度和位置观察到。随着最新的软件更新,在扫描数据的后处理过程中应用的算法使用这些多个观测数据来检测测量点是否真的存在于物理空间中。如果确定这个点不存在,而是由于激光束击中边缘或通过空间移动的物体而产生的,那么这个点就会被自动移除。
其结果是一个更干净、更清晰的点云,在点云编辑软件中需要更少的清理时间,而且更容易用于BIM建模等应用程序。
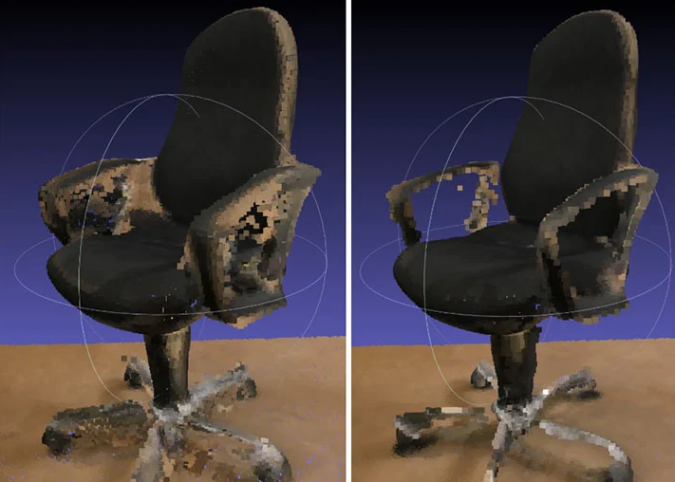
下图显示的是将算法应用于动态对象前后的点云:


NavVis联合创始人兼首席技术官Georg Schroth表示:“我们一直在努力开发一种非常精确的SLAM技术,以显著提高移动设备捕捉点云的质量。”“正如这个最新的软件功能所显示的,SLAM为激光扫描和AEC专业人员提供了大量的潜力,他们正在寻找技术,不仅加快数据的捕获,而且提供高质量的点云。我们看到了这项技术的巨大潜力,并期待分享未来的创新。”
的更多信息在这里看到的.











