如何获得最佳精度和点云准确性
我们很少停下来欣赏现代测量技术是多么复杂。测量员使用最先进的物理学,有几十年的经验,在每个组件。因此,在这样复杂的系统中,存在许多误差来源。然而,幸运的是,我们可以广泛地讨论这些,以便更好地理解我们的测量的准确性。本文将从测量员的角度进一步讨论获得测量和点云精度的一些要点。
IMU准确性
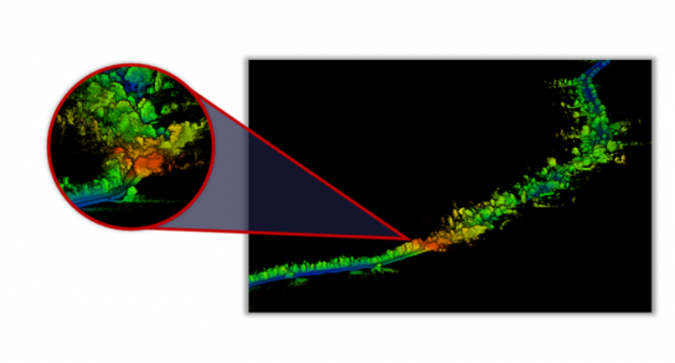
惯性测量单元(IMU)测量它所受的内在运动。通常使用陀螺仪和加速度计,IMU将确定其加速度和其方向的变化。因此,对于测量师来说,IMU是极其重要的。这是因为测量通常是为了最大的方便而在距离自己很远的地方观察物体,但是物体离得越远,它的位置就越不准确。考虑下面的图表;对于所有的测量都存在固有误差,包括由IMU测量的角度变化。
取一个小角度近似值,物体位置上的误差就是到物体距离的角误差x。这意味着,一个微小的角度误差可以很容易地导致一个非常大的差距,在一个很长的范围内,被测物体的位置。用于测量的典型IMU(如OxTS NAV650 IMU)的精度可能为半度。
IMU对于导航目的也非常重要。本质上,IMU测量运动。这意味着测量师可以使用它作为基本导航设备来跟踪IMU如何移动。因此,可以使用高级IMU来输出基本的方向信息,而且可以输出IMU的位置。然而,所有乐器都展示了随机步行或漂移的测量,这将对点云精度产生负面影响。因此,只有一个IMU将在衡量运动时从其真实位置迅速漂移,并且没有本地化位置。

GNSS本地化
GNSS(全球导航卫星系统)系统利用轨道上的卫星星座确定其在地球上的位置。利用来自这些卫星信号的高度精确的时间信息,GNSS接收器能够确定其在地球表面不到一米的位置。通过使用另一个接收器,通常被称为基站,可以计算出卫星信号在大气中是如何失真的,这可以将该装置的精度提高到甚至一厘米。
还有其他系统可用于本地化位置,但大多数人仅限于大型基础设施环境,以便在无法接收到GNSS信号时,在户外环境中没有真正的竞争对手。GNSS在地球上提供高度准确和精确的绝对定位,而许多替代品只能在没有GNSS本身的帮助下提供相对定位。
GNSS星座
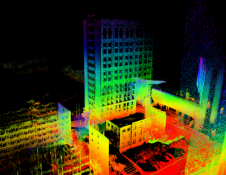
目前使用的GNSS卫星主要有四个星座。长期以来,俄罗斯和美国的GLONASS和GPS星座一直被广泛使用,但欧洲和中国的伽利略和北斗星座也越来越普遍(也有其他星座,如QZSS)。一般来说,使用这些单个星座的精度是相似的,但GNSS系统可以通过使用多个或所有四个星座的组合来最好地利用所有可用的数据。在下图中,你可以看到INS系统的轨迹。仅GPS(蓝色)位置轨迹和GPS和GLONASS(红色)轨迹显示。当车辆经过一些碍事的树木和建筑物时,卫星信号丢失,位置发生漂移。在后期处理中,这可以通过蓝线位置的突然跳跃看到,而且它似乎移动到了错误的车道上。然而,在红线中,我们没有看到这样的跳跃,而是在正确的位置上有一个平稳的轨迹。这是因为GNSS系统需要最少数量的卫星才能提供最佳结果。卫星越多,星座越多,位置输出就越可靠,尤其是在城市或城镇等GNSS环境较差的地方。 Nowadays systems such as the OxTS xNAV650 are moving towards offering all four of these constellations as standard for the most reliable solution.