Hovermap-PointCab集成,利用激光雷达数据
Emesent公司的Hovermap无人机激光雷达解决方案和PointCab公司的3D数据可视化软件的新集成将节省用户的时间,并改善他们的输出。
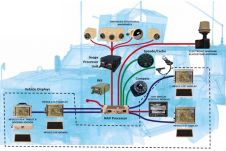
HovermapEmesent的旗舰产品,是一种自主和测绘有效载荷,能够捕获地面或地下、室内或室外的高分辨率激光雷达数据。Hovermap的自主功能允许它在视线和通信范围之外飞行支持的无人机(uav或“无人机”),如DJI M210、DJI M300或Acecore Zoe。
PointCab起源是一个3D数据可视化、操作和测量工具,可以方便地组合来自不同来源的多个扫描,包括地面和移动扫描,以生成一个项目。用户可以创建楼层平面图和剖面图,测量面积、距离、体积等等。点云的全部或部分可以直接传输到CAD程序中,或者项目可以以AutoCAD文件或可互换格式输出。
简化点云以建模工作流
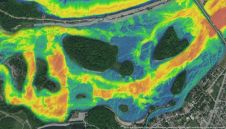
新的集成使PointCab Origins能够自动检测Hovermap扫描,并为最佳结果选择项目设置。在最新版本中,这种集成可以得到清晰的图像和更精确的矢量化,并将简化点云建模工作流,节省用户时间。
通过PointCab的直观处理和全面的工作流,该集成将减少产生高质量输出所需的时间,允许Hovermap用户轻松地将他们的高分辨率扫描转换为完整和全面的项目,生成详细的BIM或CAD模型。
在操作Hovermap数据时,用户将能够利用所有标准的PointCab Origins模块。其中包括Layouts & Sections,只需点击几下就可以创建平面图,以及Sketch,它提供了测量区域、距离和角度的工具。
具有挑战性的环境
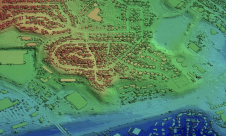
Emesent首席执行官Stefan Hrabar博士表示,该集成将帮助测量、建筑或规划行业的Hovermap用户从扫描中获得更多信息。Hovermap允许用户从最具挑战性的、没有gps的区域捕捉数据,比如建筑立面或从最高电缆到甲板下的整座桥。与PointCab Origins的集成为他们提供了快速、简单的可视化、测量和数据操作。”
“我们很高兴能与另一家市场领先的技术供应商合作,”Hrabar博士说。“整合我们各自的解决方案将帮助客户节省时间、提高生产力和提高产出,使他们更容易追求新的机会和提高回报。”