GeoSLAM发射ZEB-REVO
本文最初发表于测绘学的世界.
GeoSLAM宣布推出ZEB‐REVO -下一代移动手持3D激光扫描仪。该扫描仪建立在其前身,ZEB1,具有更快的扫描仪,更简单的操作和更大的通用性。其核心是GeoSLAM行业领先的同步定位与测绘(SLAM)算法,该算法可以在不需要GPS的情况下对封闭环境进行快速移动测绘。
这种通用性使得ZEB - REVO适用于各种应用场合,否则使用传统的测量技术会被证明是困难或耗时的:
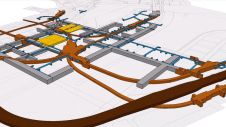
- 扫描至BIM和测量建筑调查
- 地下矿山和洞穴测绘
- 林业扫描和生物量计算
- 船舶检验和建模
- 库存数量的调查
- 犯罪现场重建
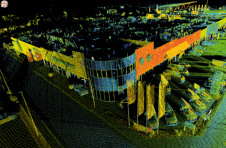
与ZEB1类似,ZEB REVO每秒捕获43,200点。但是,传感器的线速度提高到了100Hz,扫描线的数量增加了2.5倍。当与传感器头的自动旋转相结合时,分辨率、清洁度和最终点云的结构都得到了显著的改善。除了便于识别较小的特征外,改进的分辨率还有助于产生质量更好的SLAM注册结果。
由于ZEB -REVO在按下一个按钮时自动旋转,它不再需要手动点头,使扫描仪更加离散,适用于不同的环境。
首席技术工程师Ric Durrant表示:“ZEB‐REVO在设计时考虑到了多功能性。“自主头部旋转允许REVO传感器手持,但也可以背包或杆子安装,小车或车辆,甚至附加到无人机。这样的通用性为各种各样的应用打开了大门。”
ZEB-REVO仅重3.5公斤,具有移动性、简洁性和多功能性,IP64等级,这意味着该系统可以部署在多等级、恶劣的环境中,如矿山和洞穴,这是其他手推车式室内测绘系统无法实现的。
该套件仅由两个部件(扫描仪头和数据记录器/电池)和两根电缆组成,只需几秒钟即可组装完成。在一分钟内,两个按钮的推动,扫描仪头部旋转和准备调查。初始化后(和数据记录器存储在方便的背包中),扫描仪准备拿起和3D数据捕获开始。数据是以步行速度收集的,这意味着与传统的调查技术相比,典型的住宅或商业地产的调查速度可以快10倍。
GeoSLAM首席运营官Mark Reid表示:“ZEB - REVO测量速度快,使用简单,这将颠覆市场,模糊测量员和精通技术的终端用户之间的界限。
ZEB - REVO在室内的扫描范围可达30m,在室外的扫描范围可达15 - 20m。然而,密集覆盖,“特征丰富”的环境,如森林是理想的,实际上被认为是扫描仪的“室内”。该单元设有一个55GB的数据记录器,所有扫描的数据都存储在记录器上。然而,与其他地面扫描解决方案相比,文件大小最小,这意味着可以在不清除数据记录器的情况下存储长达一个月的数据。一旦获取完成,压缩数据就会下载到USB存储盘中,准备注册。
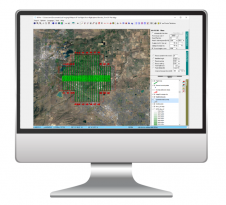
自动SLAM注册可以通过上传到GeoSLAM云(通过互联网连接)或使用新的GeoSLAM桌面本地处理来实现。云计算提供了一个付费模式,你可以使用预先购买的积分。这为用户提供了灵活性,并将前期资本支出降至最低,从而帮助所有人获得技术。对于高使用率的用户,有安全意识的用户,或者那些希望在现场查看注册数据的客户,GeoSLAM桌面提供了完美的解决方案。无限制的处理和拖放自动注册,GeoSLAM桌面可以在笔记本电脑或平板电脑上运行。一旦注册,得到的LAS文件可以直接在大多数工业标准点云和CAD包后处理。
GeoSLAM董事总经理Graham Hunter表示:“ZEB‐REVO满足了超移动室内地图解决方案的市场需求。我们的早期采用者对简单的操作、大大减少的扫描时间和合成点云的准确性留下了深刻的印象,所有这些都来自于测量一个闭环。用不了多久,ZEB‐REVO就会成为测量员工具包中的‘可接受’标准。”
欲了解更多信息,请访问geoslam.com或电子邮件info@geoslam.com