GeoSLAM Launches ZEB-CAM for ZEB-REVO
本文最初发表在地理学世界。
GeoSlam推出Zeb-Cam,Zeb-Revo移动室内映射系统的新附加选项。Zeb-CAM与现有的Zeb-Revo无缝集成,并允许同时捕获扫描数据的图像。通过集成的惯性传感器Zeb-CAM利用光学流技术来准确地将所获取的图像与点云数据同步。
GeoSLAM首席运营官马克•里德说:“我们在GeoSLAM列表en to our customers; whilst many users around the world have been benefiting from the unparalleled speed, simplicity and performance of the ZEB-REVO, several have asked for further contextual information to best utilise the resulting point cloud. ZEB-CAM therefore makes interrogation and feature extraction from ZEB-REVO data simpler than ever.
Zeb-Cam旨在维护和增强Zeb-Revo的核心益处,使其成为一种多功能的解决方案。Ric Durrant,北索族CTO说,“我们不想超越Zeb-Cam并需要保持整体系统紧凑,轻巧,操作简单。通过Zeb-Cam采用的模块化方法意味着它可以根据所使用的应用和部署方法快速连接或分离。保持简单的事情比看起来更难,但结果为自己说话。“
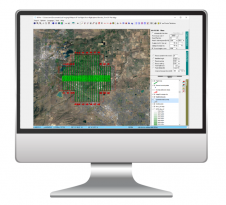
Using GeoSLAM Desktop 2017, imagery can be viewed alongside the point cloud data. Click on a point of interest in the scan and all corresponding images of that location are automatically displayed. Alternatively, find a feature in the imagery and then use the software to locate that position in the scan.
Zeb-Cam可从北索斯岛或通过我们的全球合作伙伴网络订购。要了解更多或查找当地的经销商,请访问www.geoslam.com.。