用配备激光雷达的头盔捕捉环境
一种新的移动地图方法
中国武汉大学LIESMARS动态测绘小组设计并实现了一种名为whu -头盔的紧凑型可穿戴移动测绘系统,以探索下一代移动激光扫描测绘。
高精度点云被广泛应用于公路建设、室内测绘、森林清查、电力线走廊测绘等领域。移动激光测绘是采集高精度点云的领先技术。在过去的几十年里,机载/无人机系统、车载系统和手持(背包)系统已经越来越多地用于各种目的。随着无人机(uav)和机器人技术的发展,轻便、低成本、灵活的移动激光扫描系统正逐渐成为主流。然而,基于无人机/机器人的移动激光扫描系统在困难的环境中能力有限(例如拒绝gnss的地区和建筑工地)。可穿戴移动激光扫描系统的优点包括低成本、小型化、灵活性和无线通信(如5G)的集成,这就是为什么这些系统代表了下一代移动激光扫描。由杨毕生教授领导的中国武汉大学LIESMARS动态测绘小组,设计并实现了whu -头盔——一种紧凑的可穿戴移动测绘系统——以探索下一代移动激光扫描测绘。

WHU-Helmet
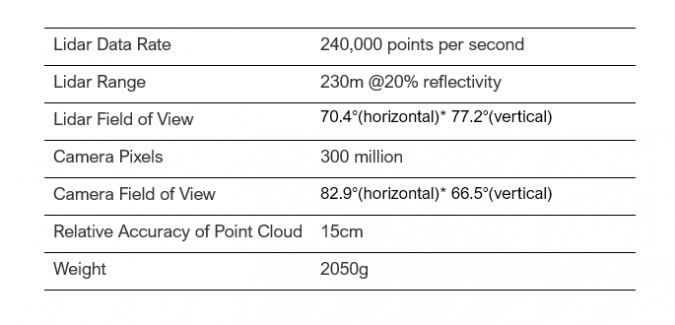
包括激光雷达、单目相机、IMU、GNSS接收器(可选)和高性能边缘计算单元在内的传感器都已集成在whu -头盔系统中(见图2)。whu -头盔的规格见表1。
首先,在几何和语义层面融合点云和图像(Li et al., 2019;杨和陈,2015)。第二,多传感器融合同步定位与测绘(SLAM)技术(Cadena et al., 2016;Wu et al., 2020)实时计算系统的位置和方位,生成高精度三维点云。最后,结合5G技术,将点云实时传输到控制中心。下面简要介绍whu -头盔的关键技术。
多传感器自校准
激光雷达、相机和IMU的外部标定是确定传感器坐标系之间的变换矩阵,这是点云图像融合和多传感器SLAM的基础。一种灵活、准确的自校准方法已经开发出来(Li et al., 2020)。
点云图像深度融合
点云与图像融合是场景理解和多传感器融合SLAM的基础。在WHU-Helmet中,在语义层实现了点云与图像的深度集成。
多传感器fusion-based大满贯
基于多传感器(如激光雷达、相机、IMU)融合的SLAM可以克服单一传感器在光照条件快速变化、运动速度快、纹理差或场景退化等复杂环境下的故障。在具有挑战性的长期或多周期运行环境下,获取高精度三维点云是移动测绘系统的基础。

应用程序
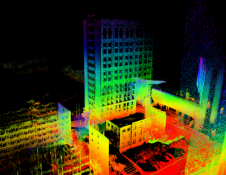
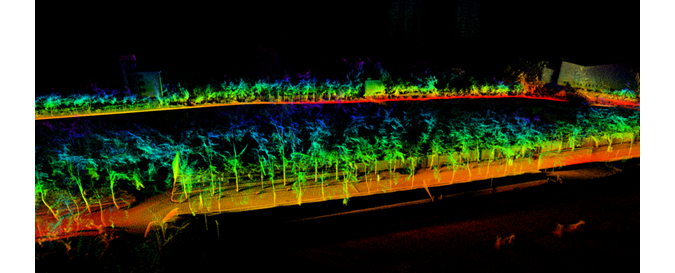
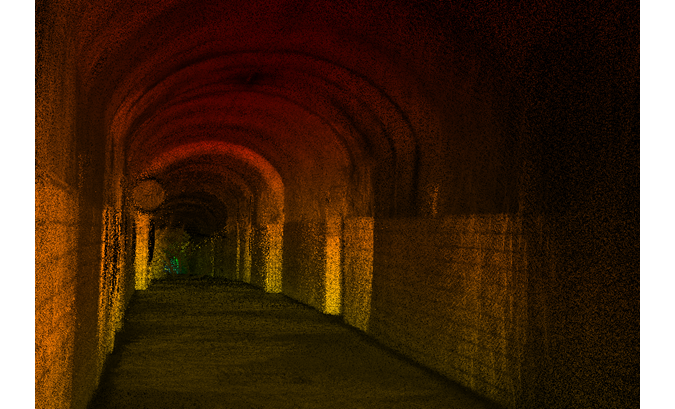
一些屏幕截图(图3-6)显示了whu -头盔所捕获的厘米级点云,显示了它在森林调查、建筑信息建模(BIM)、隧道工程、遗产文件等众多应用中的潜力。


进一步的阅读
Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza, D., Neira, J., Reid, I., Leonard, j.j., 2016。同步定位和地图绘制的过去、现在和未来:走向稳健感知时代。IEEE机器人汇刊32岁,1309 - 1332。
李静,杨斌,陈超,哈比布,A. 2019。NRLI-UAV:用于低成本无人机激光雷达点云质量改进的序列原始激光扫描和图像的非刚性配准。摄影测量与遥感学报158年,123 - 145。
J。,杨,B。,陈,C,吴,L, 2020 W。一种低成本无人机激光雷达系统的空中三角测量辅助视轴校准。《摄影测量、遥感和空间信息科学年鉴》5.
C W。,陈,李,J。,,Y。,,B。,2020年。基于分割的激光雷达里程测量方法在非结构化室外场景中的应用。国际摄影测量、遥感和空间信息科学档案43岁,535 - 540。
杨斌,陈诚,2015。机载序列图像与激光雷达数据的自动配准。摄影测量与遥感学报101年,262 - 274。
关于作者
作者杨毕生、李建平和吴维通隶属于中国武汉大学测绘遥感信息工程国家重点实验室。