Can Laser Scanning from UAV's Replace Total Station and GPS Surveys
本文最初发表在地理学世界.
Developments in the field of laser scanners and laser scanning systems have increased in the past few years. Physical size has decreased while performance has increased. The number of laser pulses per second has reached a million and the measurement distance is in the hundreds of metres.
Riegl已经在各种紧凑,强大和精确的扫描仪中实现了这些和其他功能。连接的IMU / GNSS单元,控制单元和可选摄像机在每次扫描期间收集/记录多个附加属性。由于连接系统的直接连接系统,可以在直升机,车辆甚至无人机上进行快速简便的安装 - 以最高可能的质量准确地测量道路基础设施的现代选择工具。
The system’s flexibility became an important aspect in a project of RiCOPTER UAV GmbH, which was executed in December last year on behalf of Geoprojekt LLC, one of the major geodetic companies in Croatia. The company was interested in a practical demonstration of the benefits and advantages of laser scanning for their fields of operation. The mission was to acquire both mobile and aerial laser scan data of an area of 2km x 1.5km that had previously been surveyed conventionally using DGPS and total stations. The mobile data acquisition was conducted using a car while the RiCOPTER, RIEGL’s unmanned octocopter, was used for the aerial data acquisition. To check both datasets for their relative and absolute accuracies, control points of varying sizes and reflective properties were spread across the area and measured with DGPS and total station.
A total of three flights with the RiCOPTER, including the VUX-SYS and additional cameras, were flown. To guarantee a sufficient line of sight between the pilot and the UAV in this quite large area, take-off positions had to be moved. Based on the flight plan created by the operator, the RiCOPTER’s flight was fully automatic. For safety reasons the take-offs and landings were flown manually by the pilot. The system was configured for a pulse rate of 550kHz at a flight altitude of 50m above ground level and a mean velocity of 6m/s (22km/h). Each flight took about 25 minutes and produced point clouds with a mean density of 300 points/m².
调查航班后,包括INS / GNSS系统的VUX扫描仪从RICOPTER中删除并安装在VMQ平台中。VMQ单扫描仪移动式映射系统的平台包括一个30º水平倾斜的安装座,用于放置在可调板上的扫描仪。板可以围绕垂直轴旋转15º,以提供环境的最大覆盖范围 - 即使对于复杂的结构。该平台还提供了连接各种摄像机的可能性,以便同时图像采集,以将获取的数据进行着色。由于扫描仪另外,没有相机用于将该项目的移动获取作为扫描仪提供了许多属性,如校准的反射率值,这足以进行进一步处理。
使用移动系统的数据采集在两个驱动器中完成,一个带扫描仪的扫描仪旋转30º,左右旋转30º。两个驱动器都以30km / h的速度完成。扫描仪被配置为获取脉冲重复率为550kHz和200行/秒的数据。这导致非常高的点密度(每个驱动器上的3,500点/平方米),其提供了点云中的控制对象的良好可见性。移动收购总共花了45分钟。
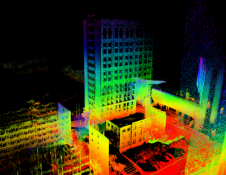
Both datasets were then processed with RIEGL’s RiPROCESS software package. Based on the initial trajectories that were processed with base station data, first point clouds of about GPS accuracy of a few centimetres to decimetres were created. Afterwards, the point clouds were recalculated by RiPRECISION, a plug-in that corrects the differences between multiple passes of an acquired project fully automatically. The result thereof was a registered point cloud with a relative accuracy of 1-2cm and an absolute accuracy of 2-3cm. In this calculation, control objects can be included to provide highly accurate georeferencing. The UAV scan data – using the previously registered mobile data as a reference – was processed with RiPRECISION as well.
结果是指向高相对和绝对精度的点云,与基于UV的系统的广泛覆盖范围相结合了移动所获取的街道数据的高点密度。
Including setup and mounting of the systems, all the data was acquired in less than a day. The consecutive processing of the data was finished within a few days as the bulk of the processing was done through automatic processes.
出于比较目的:与DGPS和全站仪的相同区域的传统调查,导致大约100分,花了两到三个队伍几周。在该调查中获得的信息仅由测量点的位置信息组成,而扫描数据也涵盖提供其附加信息的环境部分。基于扫描数据,可以获得有关驱动道路表面的信息并检测其中的裂缝。
让你的收件箱更有趣。Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
免费注册