消息
3D激光扫描仪,“看到”周围的角落
本文最初发表于测绘学的世界.
斯坦福大学计算成像实验室的研究人员开发了一种系统,可以捕捉隐藏在角落里的物体的3D图像。该团队表示,这可能是自动驾驶汽车应用的一个突破。
它是如何工作的?
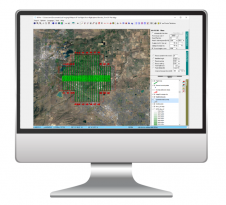
成像设备向墙壁发射激光脉冲,然后将这些脉冲反射到角落里的物体上(如图所示,物体是一只兔子)。接下来,一些来自脉冲的光子从物体反弹回来,撞到墙上,然后返回到一个设备,在那里它们被一个灵敏的光子探测器接收。
2015年12月,Hariot-Watt大学的一个团队开发了一种类似的发声工具。不同之处在于,斯坦福的解决方案使用一种算法在三维空间中成像物体,而Hariot-Watt系统则对物体在空间中的运动进行范围和跟踪。
没有当前工具可以同时执行两个任务,因为范围范围隐藏在拐角周围的物体需要非常快速的采集,而捕获3D中的对象需要更长的获取时间。事实上,斯坦福大学团队承认,扫描目前最多可能需要两分钟或一个小时,这对于自主车辆应用程序来说太慢,并且可能是经常扫描应用程序。
除了显著加快采集时间外,斯坦福大学的研究团队希望有一天能将他们的系统改造成使用激光雷达,尽管他们指出,这可能具有挑战性,因为目前的技术仅用于捕捉直接反射。
有关更多信息,您可以阅读《自然》杂志上的原始研究.