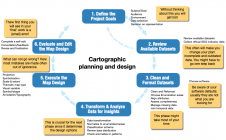
使用无人机进行平屋顶排水计算
UAV摄影测量精度和高GSD不均匀性
城市区域建模,重点是平屋顶排水计算,是近年来无人机使用显著增加的一个应用领域。在捷克共和国的布尔诺科技大学研究中心建立了一个校准基地,从三个不同的飞行高度观察了无人机摄影测量的可能性和局限性,使用低成本传感器在具有高GSD非均匀性的城市环境中。该项目还评估了三种目前可用的处理软件解决方案。
今天,干旱的挑战是捷克共和国乃至全世界的一个热门话题。在农村和城市地区,水的供应问题都通过保水技术得到解决。雨水可以积累起来供以后使用,也可以渗入土壤。准确确定屋面雨水径流量是有效规划的重要步骤。正确的屋面排水计算取决于屋面的形状和面积,对于平面屋面,尤其要准确确定边坡。平屋顶的最小斜度应该是2%。配备商用相机的低成本无人机(uav或“无人机”)经常用于地理空间数据采集。由于其明显的经济、速度和效率优势,无人机越来越受到地理空间专业人士的青睐,也可以有效地用于平屋顶空间定位的精确测量。随着计算机视觉的发展,许多基于结构运动(SfM)算法的软件解决方案已经被开发出来,促进了快速和高效的三维物体模型的生产。然而,这种表示的几何精度受到飞行设计、相机质量、SfM算法和地理参考策略等多种因素的影响。
在地理参考阶段,地面控制点(gcp)的数量和分布至关重要。SfM摄影测量三维模型的几何精度高度依赖于地理参考策略。精度在很大程度上依赖于束平差中引入的gcp的数量。gcp数目与照片数目之比应为1:100-1:15,以达到最大的垂直精度。
软件比较
有各种研究分析了无人机在建成区的使用,其中一个项目涉及无人机对德国汉诺威的一个建成区的监测。这项研究包括使用各种软件包进行摄影测量分析。试验场由放置在地面上的33个gcp组成。GCP精度约2cm,图像分辨率1.7-3cm。结果表明,虽然边界附近的点有高达9cm的高z残差,但平面坐标2cm和高程4-5cm均存在均方根误差(RMSE)。对平坦地区(停车场、屋顶)的分析表明,不同时期的高度差在-15厘米到15厘米之间。其他使用不同软件解决方案的研究结果也表明,地面样品距离(GSD)的高度不均匀性可能会导致严重的问题。
基于相关研究的比较,在布尔诺理工大学的先进材料和结构中心设计了一个准确的校准场(adma)来评估无人机成像几何精度的能力。该领域包括105个放置在地形和屋顶上的gcp,以评估不同高度的gcp的影响。几何精度对于这些摄影测量输出的合理应用至关重要,即对城市区域建模和平台屋顶排水计算。图像的GSD不均匀性很高,其精度取决于像素大小、GSD和gcp的数量等。今天的摄影测量软件解决方案大多能够自动计算束调整。这些通常是用户干预可能性最小的软件包。的PIX4D,Agisoft,宾利ContextCapture采用软件包对屋顶空间定位精度进行测试。

ADMA校准基础
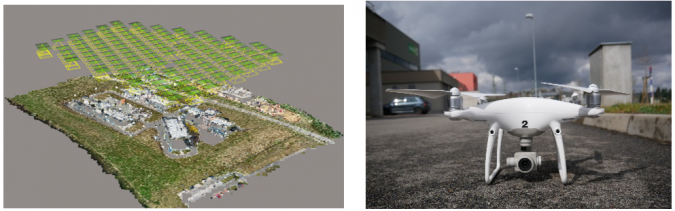
为获得高质量的无人机测试结果,提出建立由105个gcp组成的精确校准基地,均匀分布在区域内。布尔诺科技大学AdMaS中心的校准基地使无人机的摄影测量成像在1-6厘米的GSD。重点研究了高度分割;gcp是在地形、露台和屋顶等不同高度上定义的。在图像中GSD变化较大的情况下,4栋高层平顶建筑便于进行精度测试。建筑物的高度变化约为16米。gcp用一个19x19cm的方形黑白靶来标记。利用地面方法两次独立确定三维坐标,利用GNSS确定测量网点。ETRS89中记录的三维坐标转入捷克国家坐标系S-JTSK。

无人机成像
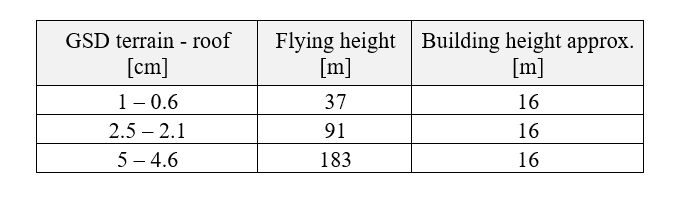
按照地形上平均GSD为1cm、2.5cm和5cm的三个高度水平进行成像。使用DJI Phantom 4 Advanced进行成像。图像的侧圈和终圈为85%。采集了三组图像,共909张垂直图像。飞行速度和快门速度与图像模糊有关。由于建筑高度的关系,每个图像中的GSD会随着飞行高度的变化而变化。平均值见表1。
处理
生产摄影测量软件的选择是影响测量结果质量的一个重要问题。许多软件包提供了不同的工作流和参数来实现SfM处理和多视图立体视觉(MVS)算法的点云生成。三个著名的商业软件包Pix4D, Agisoft metshape和Bentley ContextCapture (BCC)基于质量参数和三个度量:检查点(CPs)的空间坐标X, Y, Z的RMSE进行了比较。
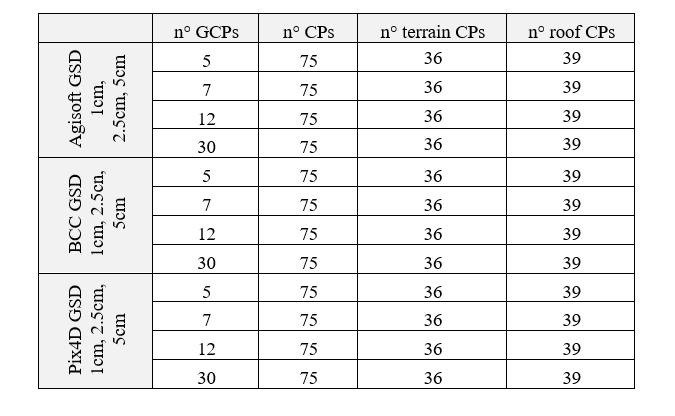
首先,从DGPS / INS确定投影中心的值。此外,测量GCP和CP的图像坐标,并自动匹配Tie点。内部方向参数(IOPS)通过捆绑调整(BA)过程中的自校准来计算。总共30个GCP,放在地形上,放置在屋顶和地形上的75个CPS,用于计算和结果评估。为BA提出了在数量和分布方面的不同VCP和CP的不同变体(表2)。为独立的CPS计算最终的RMSE。对于屋顶CPS和地形CP的坐标分别观察到RMSE(表2)。
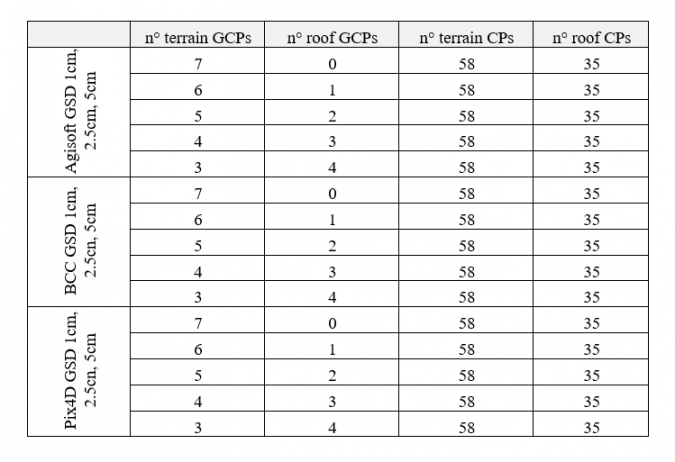
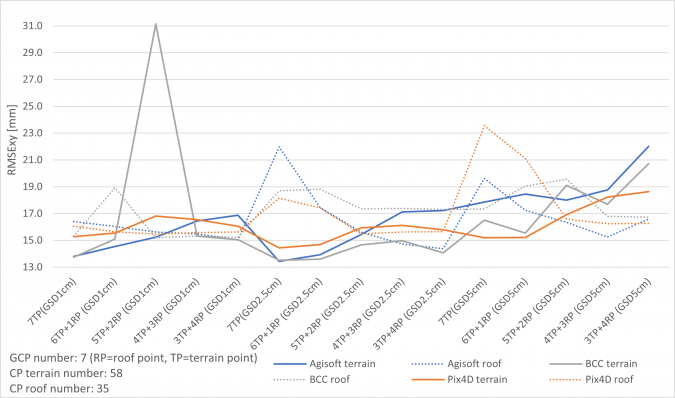
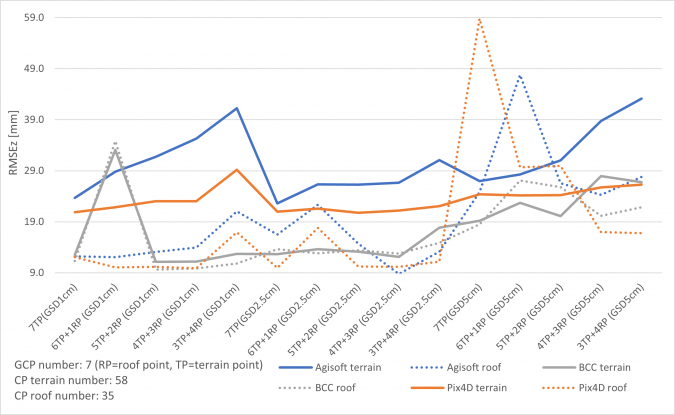
在第二阶段,计算基于七个地形GCP。为每个计算变量逐渐改变地形和屋顶点的数量。表3中显示了GCP和CP分布的细节。
结果
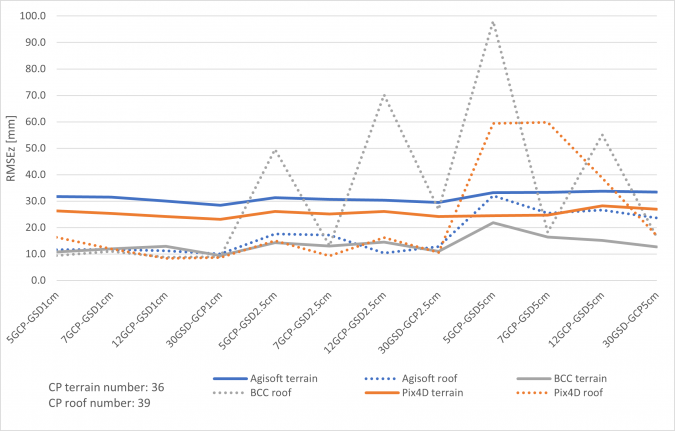
采用5、7、12和30个gcp分析了CPs平面坐标和高程的均方根误差(RMSE)。在BA计算中没有包括CPs的坐标。RMSE与gcp的数量、软件、GSD和cp的位置(屋顶或地形)有关。RMSXY在地形上放置的CPS稳定在7个GCPS上;在所有GSD变体中看到这种趋势,进一步增加了GCP的数量没有提供任何显着的准确性改进。最低的RMSE.XY在GSD为1cm的图像集上观察到地形CPs,尽管RMSEXY使用GSD 2.5cm和5cm图像集获得是可比的,并且实现了子像素精度(见图1)。另一方面,RMSEXY屋顶CPS略微差异。
软件结果分析显示,在Pix4D、Agisoft和BCC中BA计算存在差异。的RMSEz地形CPs比均方根误差差约2倍XY使用PIX4D和AGISOFT。然而,BCC在平面和高度中展示了类似的精度(参见图1和2)。
的RMSEz在屋顶上放置的CPs的平均值,大多是RMSE的两倍z在地形上放置CPs。然而,BCC计算证明具有较高的均方根误差z屋顶不稳定性采用GSD 2.5cm和5cm(见图2)。
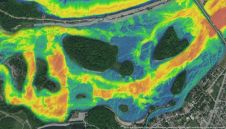
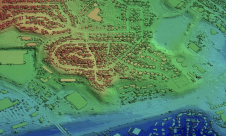
最终的AdMaS对象3D模型是使用最佳的计算变量GSD 1cm生成的,并使用额外的倾斜图像进行façade的正确解释。

结论
该项目专注于UV屋顶排水计算的无人机精度测试,重点是生产软件,GCP的数量,其分配和GSD。该测试证明了屋顶上的高精度和地形的可行性。通过使用1cm GSD图像(在地形上)和放置在地形上的七个GCP,屋顶上的平面精度对应于约2.5倍像素尺寸和对应于大约2倍像素尺寸的屋顶的高度精度。这种精度对于排水计算令人满意,这意味着无人机可以有效地用于确定平板屋顶参数。使用具有较大GSD的图像不会显着恶化屋顶上的几何精度。因此,可以实现子像素精度,但稳定性强烈取决于生产软件。

进一步的阅读
- Sanz Ablanedo E., Chandler J.:无人机(UAV)和SfM摄影测量测量的精度作为地面控制点数量和位置的函数,遥感, 2018年
- Unger, M. Reich, C. Heipke:基于无人机的摄影测量:建筑区域的监测,摄影测量,遥感和空间信息科学的国际档案,卷XL-5,2014
- Alidoost, H. Arefi:基于uas的三维点云生成摄影测量软件的比较:对历史遗址的调查,摄影测量,遥感和空间信息科学的国际档案,卷IV-4/W4, 2017