UAV传播的topobathymetric Lidar的水下枯草和植被
The Benefits of Progress in UAV and Lidar Sensor Technology
The monitoring of submerged deadwood and vegetation is gaining increased attention due to their socio-economic and ecological importance. Deadwood acts as an important underwater habitat but also poses a threat to bridges, hydroelectric power plants and riverside buildings. Underwater vegetation, in turn, is a proxy for climate change in general and global warming in particular. In this context, UAV-borne topobathymetric laser scanning constitutes a promising tool for accurately capturing and modelling these small-scale objects in high spatial resolution.
自然河流周围的冲积森林构成了生态上重要和敏感的栖息地。季节性的洪水将枯木带入活跃的河道,在该通道下游,直到自然或人造障碍物(河弯,桥梁,水电站等)阻止其移动。这种滞留的浮木在水生生态系统中起着重要作用,例如作为少年鱼阶段的庇护所,但原木果酱也会损害基础设施和居民区。除了枯木之外,对沿海植被的监测(即淹没的植被至阳光可以穿透以支持光合作用的深度)越来越引起人们的兴趣,因为这种植被充当了气候变化的代理。淹没的大植物植被以非常敏感的方式对升高水温和其他全球变暖引起的其他参数的反应。因此,从生态和社会经济的角度来看,对河流和湖泊渠道以及沿海植被中浮木的体积和分布是一个重要主题。
Game Changer
topobathymetric Lidar是绘制沿海和内陆水域沿海区域的既定工具。测深痛在电磁光谱的绿色结构域中使用短激光脉冲来测量地下水位上方和下方的物体。与使用红外激光辐射的地形传感器相比,测深传感器采用大型光束发散,这导致典型的足迹直径在约50厘米的范围内,可从载人平台获取数据获取。但是,这会阻碍淹没的原木和分支的可检测性,尤其是对于小于30厘米的茎直径。无人机 - 植入的topobathymetric激光雷达传感器的出现从根本上改变了这种情况,因为这些系统提供的小型激光足迹直径约为10厘米,高激光脉冲密度> 200点/m/m2.
在本文中,我们介绍了基于通过调查级无人机托上型激光扫描仪获得的3D点云检测和建模淹没浮木和植被的早期结果。我们证明茎,树枝和沿海植被在点云中是可以识别的。可实现的点密度和测量精度进一步允许衍生相关参数,例如浮木原木的长度和直径和大植物斑块的植被高度。这可以在高空间分辨率下对被淹没的生物量进行定量分析。
传感器
RIEGL VQ-840-G是一种集成的型线圈激光扫描系统,其中包括由工厂校准的IMU/GNSS系统和相机,从而实现了完整的机载激光扫描系统(见图1)。轻巧,紧凑的VQ-840-G Lidar可以安装在包括无人机在内的各种平台上。激光扫描仪包含频率加倍的IR激光器,在532亿次波长和50-200kHz的脉冲重复速率下发射约1.5NS脉冲持续时间。在接收器侧,传入的光学信号转换为数字化的电信号。可以在1–6Mrad之间选择激光束发散,以使地面上的恒定能量密度以进行不同的飞行高度,从而使眼部安全的操作与空间分辨率保持平衡。接收器的IFOV(瞬时视野)可以在3到18Mrad之间选择。这允许平衡空间分辨率和最大深度穿透。

VQ-840-G采用了帕尔默扫描仪,该扫描仪在地面上产生近乎椭圆形的扫描图案。扫描范围沿着飞行方向为20°x 14°,这意味着撞击水面的入射角变化很低。机载飞行时间测量基于数字化回声信号的在线波形处理。另外,数字化的波形可以存储在光盘上以进行离线波形分析。对于每次激光射击,无条件存储长度为75m的回声波形块(即无需使用事先目标检测)。这打开了可能性,例如波形堆叠,检测参数的变化或波形分析算法。该仪器的深度性能已被证明在两个以上的SECCHI深度范围内,用于单个测量。
Study Area and Datasets
研究区域位于奥地利下奥地利多瑙河支流的阿尔地山前皮拉赫河的尾水。研究地点位于Natura 2000自然保护区,砾石床河的特色是蜿蜒的路线,响应于洪水峰,经常发生地貌变化。河流的平均宽度约为20m,平均年排放量为7m3/s和最大深度约为3m,可全面覆盖整个河底,并带有腰骨底部的激光雷达。冲积植被(树木,灌木丛,灌木)经常从岸到湿的周长,导致木质碎屑经常输入到河里。此外,较大的洪水峰将浮木原木从上游运输到研究区域,那里的原木通常会持续更长的时间,然后随着下一个洪水峰进一步漂移。
邻近洪水平原的地下由过去采石场的河砾石主导,留下了大约十几个地下水供供应的池塘,最大深度为5.6m,并具有水下植被斑块。复杂的测深以及淹没的浮木和沿海植被的出现使该地点成为无人机培养基甲状腺膜瘤激光雷达的理想研究区域。
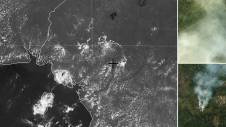
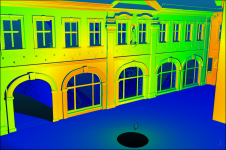
The area has been surveyed twice with the RIEGL VQ-840-G in the recent past. In November 2021, the scanner was mounted on an octocopter UAV operated from 50–60m above ground level with a beam divergence of 1–2mrad, providing footprint diameters of around 1dm, and with a pulse rate of 50kHz and 200kHz. A simultaneous UAV-based photogrammetry flight mission served as a basis for colouring the Lidar point cloud (see Figure 2). In February 2022, the same instrument was mounted on a helicopter platform. While the aim of the UAV-borne acquisition was maximum spatial resolution to detect submerged logs and branches, the focus of the helicopter integration was to maximize the penetration depth. For this reason, a larger beam divergence of 5mrad was used together with a receiver FoV of 9mrad, delivering full bottom coverage of the surveyed ponds alongside additional vegetation heights.

方法和结果
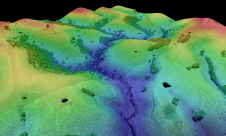
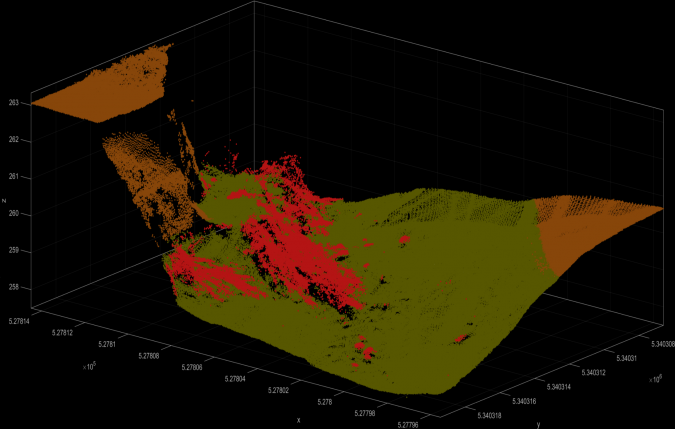
The processing pipeline mainly followed the standard bathymetric Lidar workflow. After strip alignment and georeferencing, we modelled a continuous water surface model from all air-water interface Lidar reflections and performed run-time and refraction corrections of the raw measurements. The corrected points served as the basis for deriving the DTM (bare ground + submerged bottom). In addition, the volumetric point density of all remaining water column points enabled automatic classification of the underwater vegetation. Visual analysis revealed two categories of submerged vegetation: (i) single broad tree stems and (ii) bunches of smaller branches and vegetation patches.
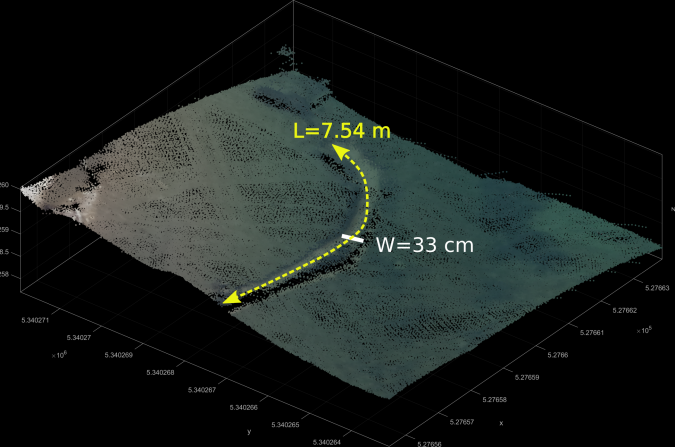
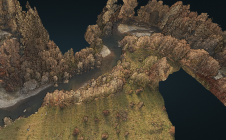
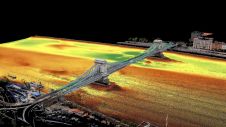
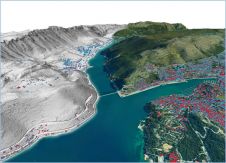
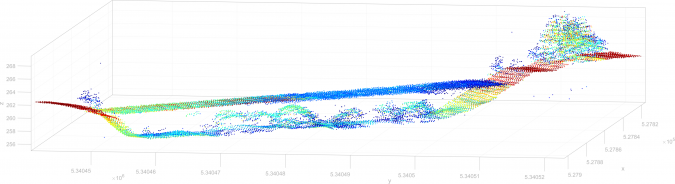
图3显示了由RGB着色的大个子茎的3D点云,图4具有整个柳树的许多细分支,分类为分类。这两个示例都证明了(i)检测和(ii)从无人机培养基甲状管局部云中自动对水下植被进行分类的可行性。图3a中茎的长度和宽度分别为7.54m和33厘米。与在干燥森林中的枯木相反,淹没的浮木通常更稀疏,缺乏地下室会促进检测。另一方面,激光信号在水下的正向散射会导致点云的模糊,这使自动检测密集的小结构(分支)自动检测以及由于浸入浸入式浮木点的逐渐扩大而增加的植被斑块的精确估计,随着浸入式浮木点的逐渐增加而增加水深。淹没大植物植被的斑块如图5所示。
结论和前景
无人机和激光雷达传感器技术的进展正在使淹没地形的捕获以及详细的枯草和淹没植被等复杂特征的检测。无人机 - 传播的顶膜法传感器具有约1MRAD的激光束发散,在高度约为1毫米。50m提供了次级激光足迹直径。加上200kHz的高脉冲重复速率和5-6m/s的慢速飞行速度,这导致点密度超过200点/m2,因此非常高的空间分辨率。此外,传感器具有用户定义的光束发散,接收器的视野和扫描速率,使得可以平衡深度性能和空间分辨率。
基于3D点的自动分类,现在可以量化淹没的枯木(茎长和宽度)和沿海植被(植被高度和体积)的参数。对处理管道的进一步改进将需要未来的研究。重点是更好地了解绿色激光辐射与水和激光视线中多个小规模对象的相互作用,以改善已建立的全波处理技术以处理这些复杂的目标情况。感兴趣的其他主题包括改善淹没浮木,植被和水底的自动分类,单个枯木原木的分割,沿海植被的表征以及对派生指标的独立准确度评估。
使您的收件箱更有趣。Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
免费注册