基于uas的激光雷达测绘复杂地形和植被结构
用于非常高分辨率点云的新型轻型激光扫描仪
轻型、测量级激光雷达传感器的发展,使无人机系统(UASs)装备非常精确的激光扫描仪成为可能,从而在近距离三维测绘领域开辟了新的可能性。为了测试无人机的激光扫描能力,使用安装在RIEGL ricopuas平台上的RIEGL VUX全波形扫描仪进行了飞行实验。在实验中,下奥地利Pielach河沿岸的冲积森林的地形和植被结构都被捕获。得到的点云密度超过1500点/平方米,精度超过2厘米。
Neubacher Au是皮埃拉赫河和多瑙河汇合处附近的一个自然2000保护区(图1)。由于洪峰期间周期性的洪水泛滥,这里的景观高度动态。河流地形包括原始河道、侧河道和牛轭湖。地形和植被结构都在不断变化。冲积林是水栖和陆生生境的退隐区,具有较高的生态价值。由于地形和植被的高度复杂性,使用传统的陆地或航空技术绘制这些敏感地区的地图具有挑战性。
最近,重量小于10公斤的测量级激光雷达传感器的发展,为复杂自然景观的高分辨率3D绘图提供了新的视角。为了测试无人机机载激光扫描的潜力,使用安装在无人机上的RIEGL VUX传感器进行了飞行实验。
传感器系统
运营商平台是一个Riegl Ricopter,它是x-8阵列八端口。四个可折叠的载体臂,每个携带两个螺旋桨的同轴阵列,附接到碳纤维主框架。吸收的底盘可实现安全的着陆。包括电池和所有传感器组件的最大有效载荷为16kg。在25kg的最大剥离质量(mtom),尖峰达到30分钟的飞行时间。最大飞行高度为150米,但需要考虑民事无人机飞机的国家限制。
VUX传感器系统是机械和电气整合到Ricopter飞机机身中。它包括全球导航卫星系统(GNSS),用于捕获飞行轨迹的惯性测量单元(IMU),Vux-1飞行时间激光扫描仪,控制单元和用于视频下游的相机。此外,两个SONY Alpha 6000 RGB相机可以安装在UAS上。扫描仪具有350kHz的有效测量速率,总视场(FOV)为230°。大型FOV对植被映射有益,因为树木可以从顶篷和侧面捕获。根据供应商的数据表,测距精度为10毫米。图2显示了UAS和传感器系统的照片,刚刚在起飞之后,在背景中可见。

数据采集
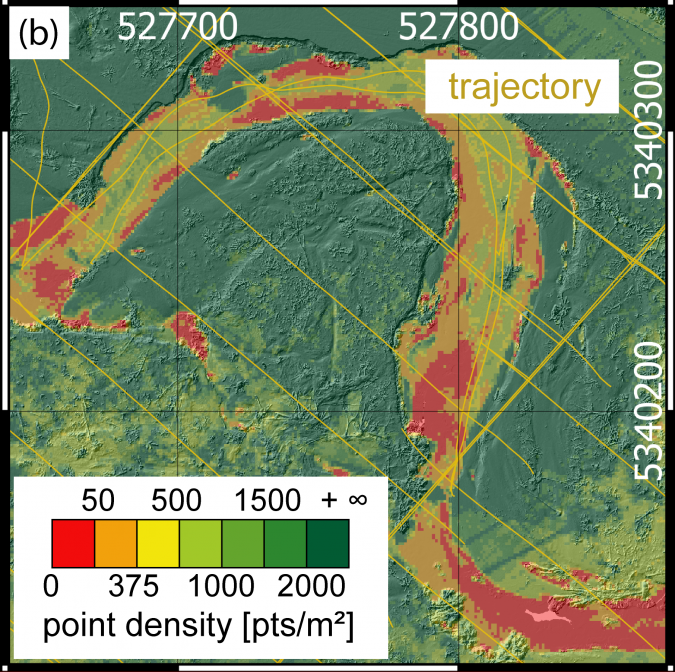
数据采集于2015年2月26日树叶脱落条件下。飞行人员包括飞行员遥控无人机和基于视距或视频图像的传感器。另一名操作员在地面站计算机前进行飞行任务指导。目标区域的获取是基于标准机载激光扫描(ALS)飞行计划的纵向和横向条带。常规长条距离为40米,飞行高度为50米,距最高树木高度约15米。根据传感器到目标的距离,产生的激光足迹直径在1到2.5cm之间,可以检测小型植被对象。导航系统的起飞和初始化是手动执行的。GNSS/IMU系统最初在地面和起飞后通过无人机的向后移动进行对齐。在完成初始化程序后,自动驾驶仪接管控制,RiCOPTER随后以8m/s的速度自主飞行程序路径。任务参数和大扫描视场导致平均激光脉冲密度为1500点/米2并且在多条带中重叠,以便从各个方面捕获植被。
高条形重叠另外被用于通过条形调整在后处理中对整个传感器系统进行彻底的校准。这是通过同时最小化超过100,000封信件的点对面距离来实现的。在条带调整中,采集系统被完全重新校准。这包括扫描器校准参数的估计(如测距仪刻度误差),安装校准参数(如定位偏差和杠杆臂),以及与条带相关的轨迹误差(如GNSS和IMU误差)。调整后获得的点云质量有了实质性改善,最终相对精度为1.7cm(图3)。

结果与应用
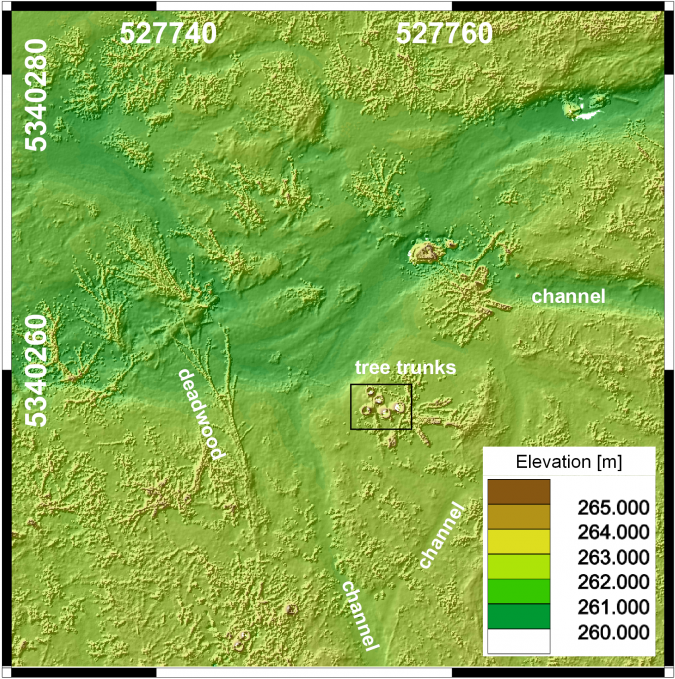
虽然彻底处理飞行数据仍在进行中,但第一个初步结果如图4所示。如图4A所示,通过反射率呈现致密的3D点云的透视图,其中躯干,阀杆和较厚的分支出现在表现出高目标反射率的红色色调中,对于较薄的枝条及其提示,观察到较高的目标反射率和较低的值(绿色至蓝色)。图4B示出了近地5CM分辨率数字高度模型(DEM)的一小部分,其展示了地形特征和死木可以以显着的清晰度映射。此外,点云燃料的密度和空间相干性希望这些点云也可用于表征地形粗糙度,精度优于10cm。潜在的应用领域是洪水建模,除了几何形状,粗糙度(流动阻力)是一个重要的输入参数。
图4a和4b都显示了超高密度3D点云用于详细的单树建模的潜力。地面激光扫描(TLS)很难实现从树干到树冠的各个方向的点的单株树木的完全覆盖,但无人激光扫描(ULS)由于灵活的飞行路径而成为可能。因此,ULS点云结合了TLS(短传感器到目标距离)和ALS(规则平面点间距,鸟瞰视角)的优点。与TLS相比,ULS中的扫描阴影更少,因为激光束首先穿过较为稀疏的冠层区域,然后击中靠近地面较粗的树枝和树干。由于高的扫描速度和产生的超高点密度,许多最后的回波击中地面表面。这使得可以推导出网格间距在10cm范围内的高分辨率数字地形模型(DTM)。

胸径(DBH)在林业中是一个重要的参数,因为结合树高,它可以估计生物量。虽然从ALS中获取树高已经是最先进的技术,但基于激光雷达遥感的胸径估计目前只能通过TLS实现,这在森林环境中既耗时又费力。图4c显示了ULS点云的水平剖面图,其中包括地形上方1.20-1.40m的所有点。在这个数据集中,阀杆直径可以直接以厘米精度测量。在图4c中,每个飞行带的点都使用了不同的颜色,突出了显著的地理参考质量。
结束语
采用安装在RICOPTER UA上的RIEGL VUUS传感器系统的现场实验提供了一种包含形状和植被的复杂冲积区域的均匀的超高分辨率3D点云。点密度超过1,500点/米2实验表明,uas激光扫描技术在不同环境科学和应用领域具有很高的应用潜力。