基于无人机的激光扫描技术的现状
用无人机进行机载激光扫描
机载激光扫描(ALS)为绘图和变化检测提供了一系列机会。然而,由于传统肌萎缩性侧索硬化症(ALS)的成本通常较大,多时相激光测量仍然很少被研究和应用。无人机系统(UASs)提供了新的方法,以更经济的方式执行激光扫描调查,这为许多新的变化检测应用打开了大门。固定翼系统和旋翼飞机这两种主要的无人机平台之间的适用性有什么不同?与无人机系统兼容的激光扫描系统目前的技术水平是什么?继续往下读吧。
(文/ Antero Kukko, antoni Jaakkola和Juha Hyyppä,芬兰地理空间研究所FGI)
利用UASs进行激光扫描是一个相对较新的研究和应用领域。2006年的起点之一是一架配备导航传感器和适合地形测量的激光测距仪(高度计)的遥控直升机。带激光扫描仪的大型UASs的使用已经研究了近10年,并推动了业界关于基于UASs的激光扫描可能性的大量讨论。
无人机平台比较
无人机一般可分为两类:固定翼飞机和旋翼飞机。每种类型都适合于特定的应用程序和任务。由于更好的燃油经济性,固定翼系统通常为用户提供更长的操作时间和更大的有效载荷。固定翼系统也允许更快的速度,这使得这种类型的无人机更适合大区域或远程任务。固定翼平台在飞行中比旋翼平台更稳定,后者以更复杂的方式与惯性作斗争。另一方面,固定翼系统在转弯时需要更多的空间,从而增加了路径长度,降低了效率。此外,固定翼无人机需要更多的起飞和降落空间,这使得它们不太适合基础设施很少或没有的偏远地区。从数据采集的角度来看,固定翼平台的更高速度降低了数据密度,或者需要更昂贵的高性能传感器来达到一定的点密度。总而言之,这些限制使得固定翼平台不适用于需要捕获的地形复杂或物体特征丰富的小范围调查。相比之下,旋翼飞机允许低速甚至静止的飞行速度。 They offer excellent manoeuvrability and do not require an airstrip for take-off and landing. This enables the use of relatively low-cost sensors, which makes UAS-based laser scanning accessible to a wider user community.
工业系统
有几种工业扫描仪,配备了适用于无人机激光扫描的负担得起的传感器。这些传感器大多是为工业应用和机器人技术(如SICK、Ibeo和Hokuyo制造)而设计的。这些传感器的主要优点是价格低、体积小和耐用,这些都是基于无人机的激光扫描的优点。然而,这些类型的传感器的性能是有限的。数据收集的速度、测距精度、有限的最大范围和经常缺乏实现或可用的信号处理技术,意味着它们并不总是适合商业大用户操作,但它们足以满足许多其他(研究)应用。最近出现的其他无人机兼容系统是来自汽车行业的多层激光传感器,如Velodyne LiDAR Puck LITE和Quanergy M8-1 LiDAR。这些系统以合理的价格提供高数据速率和其他一些理想的功能。多层数据采集提高了沿轨采样,360度视场可以对城市环境等复杂场景进行更全面的数据采集。
专业的传感器
无人机专用传感器专为机载操作而设计,其规格使其更适合于专业使用。然而,他们的设计对定价有明显的影响,这类产品的系统的价格标签从数万欧元开始。在无人机上安装这样的传感器会显著增加整个系统的成本。这对利用它们的能力开发地图行业产生了负面影响。专业传感器的例子是Riegl VQ-480-U或VUX-1变种,它们是全性能传感器。它们允许在高海拔(500- 1500米)进行操作。然而,在这些高度,载人飞机通常是一个更方便的方法,也因为UASs的严格规定。
低空无人机的例子
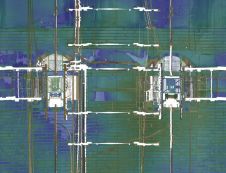
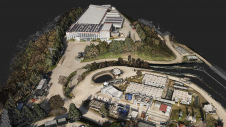
前面提到的Hokuyo和Velodyne激光雷达Puck LITE是适用于低空任务的传感器的例子,由于安全法规,这是无人机操作的典型先决条件。这些传感器可以在高达100米的飞行高度工作,但实际上典型的操作高度是40-70米。如图1所示的小型无人机的飞行能力约为20分钟,包括安全裕度,但飞行时间也取决于风条件。这导致飞行路径长度在1.5到2公里之间。视野60度,飞行高度70米,这使得捕捉80米宽的长条成为可能。图2显示了Hokuyo UXM-30LXH-EWA用于绘制河床地形的点云数据示例。插图显示了小点杆的航拍图像(也是用无人机获得的)。
用于城市遥感的无人机系统
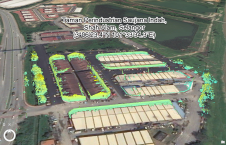
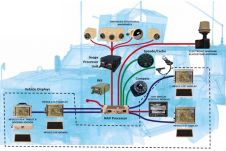
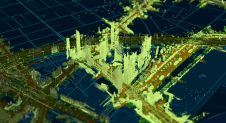
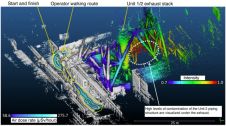
城市环境中的应用是多种多样的,可能从用于建筑规划的一般区域测绘到用于维护的电力线组件的精细尺度检测。城市空间常常是繁忙的。它几乎没有纠正错误的余地,而且故障造成人员和财产损失的风险很高,这意味着在城市环境中应用UASs具有挑战性。然而,它被认为是一种有趣的新技术,提供了一系列新的绘图和变化检测应用程序。图3中的数据是使用配备Velodyne激光雷达Puck的旋翼无人机收集的。这里使用的传感器包还包括NovAtel IGM-S1 GNSS-IMU设备,用于观察和记录传感器的飞行路径和方向。该平台自主执行飞行计划,同时通过无线局域网连接到系统的显示器查看操作进度。利用GNSS基站数据或虚拟网络数据进行后处理,计算出准确的(校正的)飞行路径,然后计算点云数据。点云精度直接取决于飞行路径解算精度,也取决于相关传感器的性能。人们最多可以获得5到10厘米的点云精度。 The point densities in the data can be between dozens and thousands of points per square metre, which is a much larger number compared to that of a traditional ALS dataset (1-20 points per square metre). The wide field of view of the sensor allows for simultaneous capturing of the terrain, street infrastructure, building walls and roof structures.
Flash激光雷达
展望未来,闪光激光雷达技术(如ASC TigerCub)是无人机激光扫描的一个有前途的发展。Flash激光雷达允许快速的数据采集速率,同时由于框架传感的区域覆盖和重叠。这使得多视原理的数据采集,提高了目标检测和识别。然而,闪光激光雷达传感器目前非常昂贵,而且由于它们的军事来源,在民用领域只有有限的知识。另一个有趣的趋势是各种尺寸的固态光子计数传感器的发展:适合载人飞机或大型UASs使用的更大的传感器,或基于单光子雪崩二极管(SPAD)的非常小和轻量级的传感器。据报道,在研究实验室中,SPAD传感器已经可以实现与当前低成本工业激光扫描仪相同的测距性能。当这些传感器完全开发并投入使用时,在未来几年,这些传感器肯定会改变基于无人机的激光扫描领域。
图1,在芬兰北极地区发射小型无人机执行地形激光扫描任务。采集多时相激光扫描数据,监测北极河床形态。
图2,用小型无人机收集的点云数据,详细绘制地面地形和植被。
图3,安装在小型旋翼飞机上的Velodyne LiDAR Puck激光扫描仪绘制的建筑城市场景。360度的视野允许同时捕捉屋顶和墙壁。
作者
博士Antero Kukko他是芬兰地理空间研究所FGI和阿尔托大学的研究经理。他的研究包括移动激光扫描系统的开发、性能、数据融合、校准和处理。
antero.kukko@nls.fi
博士Anttoni Jaakkola是芬兰地理空间研究所FGI的研究经理,也是UAS激光扫描系统和城市地区遥感、林业和地形建模应用的首席研究员。
anttoni.jaakkola@nls.fi
胡教授Hyyppa他是芬兰科学院激光扫描研究卓越中心主任,以及芬兰地理空间研究所FGI遥感和摄影测量部主任。
juha.hyyppa@nls.fi