移动式映射的时代
Looking back over the past 30 years, it’s hard to believe just how far we’ve come in such a relatively short space of time. Geomatics students in the mid-1980s were exposed to GPS test satellites, the first GPS receivers and the enormous potential that GPS offered the geomatics community (who had already perfected what could be done with the Transit satellite system). With unprecedented absolute accuracy and an impeccable timing mechanism, GPS clearly offered a quantum leap in geomatics capabilities. Two decades later, Lidar – and in particular mobile terrestrial Lidar – seemed to represent the next quantum leap in geomatics technology since the advent of GPS.
The integration of GPS/inertial measurement unit (IMU) systems with other sensors either enhanced or replaced many of the traditional instruments and methods used in the survey and navigation world. A paradigm shift was underway. Using kinematic differential GPS positioning coupled with orientation data provided by IMUs, calculating the precise geoposition and attitude of a moving camera at the precise moment of exposure established the exterior orientation of a photogrammetric camera. The process of aerial triangulation was made more simple and more accurate. These advancements made GPS-based photogrammetry possible.
电子距离计与电子经纬仪相结合,普遍称为“总站’, constituted another great breakthrough in instrumentation that revolutionized mobile surveying. These new instruments could collect five or six discrete points per minute at centimeter-level accuracy. 2D laser profilers were added to the mix and, like total stations, were used in static mode. Positioned over known survey points, these scanners could rotate 360 degrees, capturing a point cloud that accurately represented the surrounding environment.
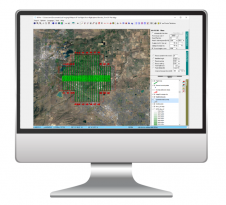
Encouraged by the results generated using kinematic platforms, laser scanners coupled with GPS/IMU systems were installed on aircraft and helicopters. The first system integrations, while bulky and heavy, provided groundbreaking results. It was possible to fly and directly reference tens of thousands of points per second with remarkable accuracy and resolution. But acquiring test and calibration data using aircraft is expensive. A side-looking scanner system was developed in order to facilitate cost-effective testing and calibration; the laser was rolled through 90 degrees, pointed the system through the side opening of a van, and collected the data while driving down the road. In the process, the world’s first mobile terrestrial Lidar mapping system (called SideSwipe) was accidentally born. Nowadays, the geomatics business has standardized on the termmobile mapping system(MMS).

在地面上运营的同时获取和维护实体的GPS解决方案呈现了另一系列挑战。在有许多潜在卫星掩盖(悬垂树木,建筑物等)的环境中,因此重点努力开发混合的GPS /惯性定位溶液。
In 2004 our company was asked to survey a heavily damaged road connecting Kabul, Kandahar and Herat in Afghanistan using its helicopter-based system. Flying in Afghanistan at the time was considered prohibitively dangerous and so the first real application for the MMS was proposed. In 2014,6T3建立了一个亚厘米,工程级MMS,以响应需要高度准确和密集的3D点云的客户。系统的四种不同版本的系统是为响应客户要求而开发的,并且2015年该公司开发了第一个背包安装的MMS,从而将门打开到广泛的可能应用中 - 甚至包括自行车。
看看MMS行业的进展有多远,是显着的。至于水晶球凝视,很难从现在开始预测到20年的预测,但我将提供以下内容进行考虑。我相信高精度点云覆盖世界各地的城市地区,并将取代传统的大地测量控制点。一旦这些高端点云被识别为验证控制点,它们将被用作未来调查的参考框架,并且将编译各种传感器数据的基础。

移动映射数据对于自主驾驶和自动化车辆系统的开发至关重要。高精度参考点云数据将需要,并且定期定期更新市场将会很大。改变检测,快速和及时的事故和灾害监测,城市规划,应急,交通管制和仿真,农业和林业是将来扩大的目前的应用。
传感器继续变小,更轻,更实惠。无人机平台正在出现。像车辆一样的新传感器,智能手机,仪表模,个人摄像机,安全性和交通探测器以及在自主车内安装和操作的传感器,将越来越集成在全球点云中,以进一步改进。
目前的技术将如何被新解决方案黯然失色?我们真正需要多少细节和准确性?地理空间世界的下一个范式转移如何看?意见有所不同。然而,在过去的30年里回顾一下,很难相信我们在如此相对较短的时间内走了多远。
Further reading
让你的收件箱更有趣。Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
免费注册