Technology in Focus: Bathymetric Lidar
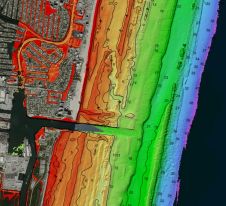
With sea-level rise and increases in the severity of extreme natural events, there has been a renewed push to further our understanding of the coastal zone. Fundamental to understanding risk in areas of high vulnerability is capturing the near-shore land and sea surface. Bathymetric Lidar is the most effective and cost-efficient technology to capture both the land and seafloor simultaneously to provide a continuous, detailed 3D elevation model along the coastline. Its ability to successfully capture elevation on both sides of the coastline, over areas stretching more than 100km along the coast, has made it the ‘gold standard’ for coastal vulnerability and near-shore benthic habitat modelling.
(内森·d·Quadros CRC空间信息, Australia)
Bathymetric Lidar is an airborne acquisition technology. As opposed to airborne topographic Lidar, which uses an infrared wavelength of 1,064nm, bathymetric Lidar systems use a green wavelength of 532nm to penetrate the water column for measuring the seafloor. Bathymetric Lidar sensors can be simplified into four major components:
- the GPS receiver which gives the aircraft position
- the inertial measurement unit (IMU) which gives the roll, pitch and yaw of the aircraft
- the laser scanner which emits the signal in a particular pattern
- 读取返回信号的传感器。
Knowing the position and orientation of all these components enables accurate measurements to be recorded by the Lidar system. Some of these sensors can now measure more than 100,000 points per second, resulting in surveys with over 10 points per m2在浅水中。在最近针对萨摩亚进行的一项调查中,在刚好超过1100公里的区域中捕获了超过18亿分2。The deepest of these measurements achieved a depth of just over 75m.
Environmental Considerations
在测深的激光雷达调查中加入水柱使它们比其地形对应物更容易受到环境影响的不利影响。这些影响会导致数据差距,减少数据覆盖范围和测量质量。为了最大程度地减少这些影响并获得成功的测深痛调查,需要考虑许多因素,例如飞行,空中交通管制,浊度,潮汐,潮汐,海平面,植被状况和地面控制可及性的天气。水的清晰度或缺乏水,是从测深的激光雷达传感器中穿透浅水的主要障碍。高浊度,海草和低反射海底构成了调查成功的风险。理解和管理这些条件可能意味着成功与失败之间的差异。
测深痛传感器的个体特征
可以说,测深痛传感器比地形激光雷达传感器具有更多的个体特征和差异。重要的是,除了测深,所有现代的测深痛传感器还可以测量地形。最明显的分裂是在浅水(<10m)和深水系统(> 10m)之间。浅水系统往往每脉冲,较高的测量频率(高分辨率),较小的激光足迹直径和较小的接收器视场具有较小的激光功率,并且通常只能在可见的水柱中测量水深。深水测深痛系统每脉冲使用更多的激光功率,较低的测量频率(低分辨率),较大的激光足迹和接收器视野。这些深水测得的激光雷达系统在深度渗透能力上从2.0到SECCHI深度测量的3.0倍之间变化。为了最大程度地提高细节和覆盖范围,如今,测得测量运营商正在使用双光学端口调查飞机同时利用浅水和深水传感器。
传感器是由扫描模式shape, tilt and method. The scan shapes vary between rectilinear, elliptical arc, circular arc, elliptical and circular (see Figure). The circular and elliptical scanners are able to look forwards and backwards, increasing the number of times an area is sampled, although this can result in oversampling along the edges of the scan. The remaining shapes are usually tilted forward or backwards with respect to the aircraft. The scan methods vary between oscillating mirrors, rotating prisms, palmer scanners, rotating multi-facet mirrors and oscillating raster scanners. All of these methods result in subtle differences in the scan pattern and can be seen in the subsequent point cloud.
A major consideration when employing bathymetric Lidar systems is laser energy per pulse. Although factors such as the receiver telescope area and field of view influence depth penetration, the laser power combined with the pulse duration is the strongest influence on depth penetration. High laser power and pulse duration tend to result in deeper water column penetration. The downside of higher laser energy per pulse is that the measurement frequency is lower, resulting in a lower point density. However, full insonification of the seabed is still possible.
Advances in Bathymetric Lidar Sensors
测深痛传感器的最新进展一直朝许多不同的方向发展。其中一些进步包括飞机中的多个传感器,具有其他传感器的更集成的系统,更快的数据产品吞吐量,飞行线之间的反射率校准,更大的点密度,增强淡水捕获以及增强点云的分类。此外,在小型无人驾驶汽车(UAV)中使用测深的激光雷达传感器仍然是早期的日子,尽管这在未来十年中可能会发生变化。云计算和大数据处理的进步也对点云处理也有很大的希望,并且令人着迷的是,该行业如何利用这些进步来为最终用户提供进一步的价值。
总结说
When selecting and employing a bathymetric Lidar sensor it is important to consider the environmental factors as well as the individual characteristics of the system. Even then, the success of a survey is often determined by the knowledge and experience of the operator. That aside, the decision about the best system for a survey will depend on the survey area, environment, project requirements and sensor availability. The aspects which commonly determine the choice of sensor relate to the maximum depth, point density, coverage, final product requirements and, not unimportantly, the intended purpose for the data.