水线以上及以下测量
本文最初发表于测绘学的世界.
Phil Mills介绍了英格兰东北部Derwent水库的一个案例研究,探讨了水下和水库周围摄影测量的准确性,以及评估堤防状况的图像价值。
有时需要对存在静水的场地进行勘察。例如,这种情况可能发生在一个老采石场,那里可能有许多这样的地区,它们在深度上可能有很大的不同。这项调查测试了使用SUA获取的数据是否能够测量合理的水深,并确定在什么深度的水平精度变得不可接受。它包括对邻近地区所取得的准确性的一般评估。
具有挑战性的环境
Derwent水库被选为这个测试的合适地点,因为它有一个已知的水下斜坡,可以用来测试测量的细节。此外,该区域有复杂的地形(最高点和最低点之间65米的高度差),提供了一个具有挑战性的飞行环境,以及隐藏/模糊的细节,以测试图像的分辨率。大坝的下游有一个堰系统,可通往德温特河,附近的田地经常有积水。
该调查使用的是QuestUAV Q200固定翼飞机,能够在风速高达35英里/小时的情况下有效飞行45分钟以上。一份适当的飞行计划是事先制定的,该计划涵盖了除了大坝下游的土地以外的利益区域,该地区属于诺森伯兰水务公司。
调查当天,天气平静、干燥、多云,能见度参差不齐。为了进行测试,他们特意选择了一个平静的日子,这样水面的波动就会很小,因此这是测量水下细节的最佳条件。
维护控制
在飞行之前,控制标记被放置在站点周围,并使用参考现场基站的Trimble GPS接收器进行测量。在这些点上重复测量,以确保精度,并采取每个点的平均位置是正确的。这些控制点在随后的过程中被用来优化照片的初始对准。另外还有77个检查点遍布整个场地,对各种表面进行取样,包括道路、水位和不同高度和密度的植被。这些点将作为对最终模型的独立检查,以便进行统计分析。他们在最终模型的生产中没有发挥作用。
让我们飞
在飞行过程中,测量数据以高分辨率静态照片的形式被捕获。在22分钟的飞行过程中,覆盖了61公顷,在此过程中拍摄了600多张照片。飞行高度是高出水面300英尺。这些照片随后使用Agisoft Photoscan进行处理,并与地面控制数据结合,以产生精确的3D坐标和正构图。
一旦最终模型完成,得到的点云就被输出到一个专门的测量包中,以便与地面测量检查点进行比较。
结果在陆地上
表1总结了与地面测量检查点相比的飞行结果。为了反映与之相关的不同特征,点被分成了类别。“可识别”的点精度在XYZ,其余的仅在Z(高度)。
在柔软的表面上,平均值用于对植被区域进行一般的高度校正。
该航班记录的水库水位与实测水位一致,读数分布为2cm。
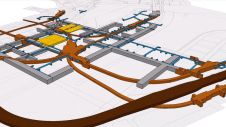
排水管被堵
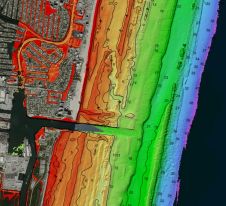
调查还强调了一些其他方面。大坝下游的排水系统是清晰可辨认的:它们可以看到草的纹理和颜色的变化,在等高线图中也可以看到波浪。在长满草的大坝下游面上,沿着大坝的一半,最上面的排水层的位置也清晰可见,同样可以从草的颜色变化中看出。沿着大坝的中段,没有明显的覆盖层的迹象。在与诺森伯兰水公司的讨论中,得出的结论是,这很可能是由于该地区的排水沟在50年的时间里一直处于堵塞状态。
同样存在和确定的是草地内的小块水域,在靠近林地的大坝南端和游客中心北部的田野上显示为黑色斑块。
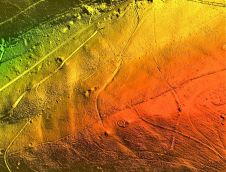
结果在水下
虽然水下细节在摄影中不够清晰,但Photoscan能够在水深1.5米左右生成一个合理的地面模型。在0.4米的深度下,模型是相当平滑的,在这一点之后,生成的表面的噪声水平大幅增加。即便如此,通过在点云的主要部分取最低点,可以计算出水深的合理估计(在实际深度的15%以内)超过1米。
水下的细节只有在垂直或接近垂直的图像上才能看到,那里的折射效果是最小的。在倾斜的角度下,只能看到水面的反射。从这个意义上说,水就像一个“自我过滤器”。因为水下图像只在接近垂直的角度出现,所以计算出的高度永远不会像地面点的高度那样精确。
结论
所得到的结果表明,可以对1½米以下的清水深度进行合理的估计。这种方法的成功商业应用需要了解数据收集的方法,如何提取相关数据,以及这些数据的准确性的限制。
为这一实验进行的调查是事先设计和计划的,以便尽可能地制作一个良好的水下模型。这些结果在不理想条件下的可重复性是未知的。
最初的要求是测试是否有可能从航空摄影计算出浅层死水深度的合理估计,这项要求得到了满足。
也有可能确定浅层地下特征,例如地下管道/薄膜以及躺在地上的地表水。虽然这些特征可以从空中数据中快速识别出来,但需要更多的专业知识来解释结果并确定其重要性,这可能是在进行更详细的调查之前。
本文发表在2017年9月/ 10月《世界测绘》杂志上