精密农业传感器融合
没有GNSS的低成本激光器相机系统
精密农业从使用无人驾驶车辆的使用中有很大利益,通常与激光器这样的活动测距传感器相结合,以收集作物下方的信息,但现有系统对农业部门相对昂贵。在该项目中,加拿大的研究人员使用了集成的传感器方向方法,用于局部引用激光雷达测量。它们的方法基于松散耦合的图像辅助惯性导航,其中相机的姿势替换了GNSS测量。结果是一种低成本解决方案,可用于捕获无法访问区域的地形数据以及GNSS拒绝环境。
传感器是农业自动化的主要组成部分之一,它既需要监测生产状况(精准农业),也需要方便农业机械的导航和部署(农业机器人)。利用无人机(uav或“无人机”)解决各种精细测绘问题,如监测作物健康、模拟田间生物物理属性和研究土壤特征(包括土壤微地形),使精准农业受益匪浅。微地形定义了地形变异性,并描述了土壤表面的变化。这一特性在许多农业现象中起着重要作用,如径流、侵蚀、聚集体稳定性、地表储存、入渗能力和植被动态。在地块尺度上量化土壤微地形的主要挑战包括在高水平分辨率(1-3cm)下从裸露土壤获得精确和完整的高程测量。被动成像,如在低空获取的无人机摄影测量是解决这一挑战的一个合适的解决方案。利用运动结构(SfM)技术和多视角立体重建技术,可以从无人机航拍图像中创建高分辨率、高精度、高精度的环境三维点云。
土壤微貌传感器
然而,由于对环境条件的敏感性以及无法通过被动成像从作物下方收集信息,需要(额外)使用主动测距传感器,如激光雷达。摄影测量的三维点云可以由激光雷达点云补充,以包括额外的几何信息。例如,如果激光雷达传感器提供多个返回值,则可以进行区分:一个来自植被顶部,可能还有一个来自较低海拔,例如裸露的土壤。
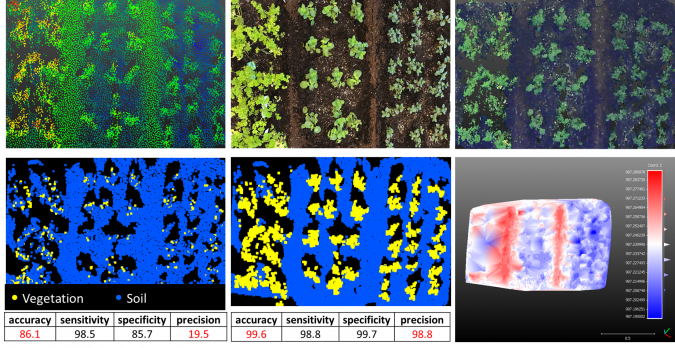
使用摄影测量与激光扫描比较了几项研究比较了农业属性的三维重建的优缺点。最短暂的结论是,没有技术对传感器和/或环境引起的所有误差和噪声彻底彻底稳健。例子是亮度变化,阴影,天气条件,反射率变化,动态物体(风中植被在风中移动),部分和完全闭塞和透视扭曲(倾斜与Nadir Imagery)。因此,整合数码相机和LIDAR传感器在船上UAV是测量土壤微型地形的实用解决方案。图2显示了从图像与颜色信息集成了LIDAR数据的示例,并通过摄影测量点云致密数据。使用支持向量机的监督分类,将对应于植被的3D分离与土壤点(A.K.A.接地过滤)自动分离出来,并且重建高度详细的数字地形模型(DTM)。
传感器集成和数据融合
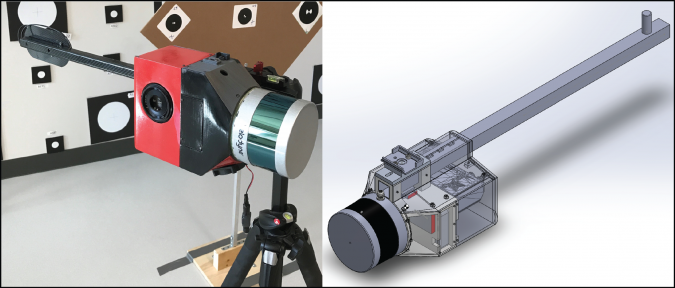
因此,开发了一种集成了被动成像和主动测距传感器的系统。建造这个集成系统的总成本为cad15000,包括一个光学数码相机(a6000,索尼),一个能够获得两个返回的3D激光雷达(VLP-16, Velodyne Lidar公司),一个惯性导航系统(VN-200, VectorNav技术),一个紧凑的处理器,电子元件和外壳。
为了测量地理转移精度,一个需要接地检查点,即具有已知3D坐标的点,而不参与捆绑调整过程作为地面控制点(GCP)。GCP误差是捆绑调整的残差,并且不代表重建精度,也不代表地理转移精度;它们仅表明了数学摄影测量测量方程如何适合观察。在这个项目中,研究人员没有测试地理转移精度,因为数据位于空间中的数据相对。对土壤微型重要的是重要的是调查期间各种时刻获得的位置的内部一致性。传感器和系统是几何校准的,并且具有集成的传感器方向解决方案,所实现的地质学精度优于局部坐标系内的1cm。
没有GNSS的图像定位
由于激光雷达在其局部车体框架内进行距离和方位测量,且频率较高,因此需要GNSS/INS (inertial navigation sensor)数据将移动激光雷达的测量数据直接在固定物体坐标系下进行地理参考,例如以地球为中心的固定地球坐标系。高精度的微地形要求高质量的惯性导航传感器支持双频实时动态GNSS接收器。这也需要访问地方或国家基站和适当的后处理软件。因此,现有的系统对农业部门来说相对昂贵。
在这个研究项目中采用的方法是使用一种集成的传感器定向方法,用于基于松散耦合、图像辅助惯性导航的激光雷达测量的局部参考。简而言之,相机的姿态(位置和方向)取代了来自GNSS的外部测量(位置和速度)。该解决方案利用图像测量来补偿惯性导航系统的时变误差(加速度计和陀螺仪偏差),并消除了对GNSS精确测量的需求。该解决方案参考了激光雷达点云在同一对象固定的局部坐标系中,摄影测量点云也在该坐标系中生成。这个局部坐标系统不需要是一个地理坐标系统,除非一个地理坐标系统中有足够的地标在图像中可见(可选的gcp可用性)。因此,该解决方案对于获取无法进入地区的地形数据以及在gnss拒绝的环境中非常有用。

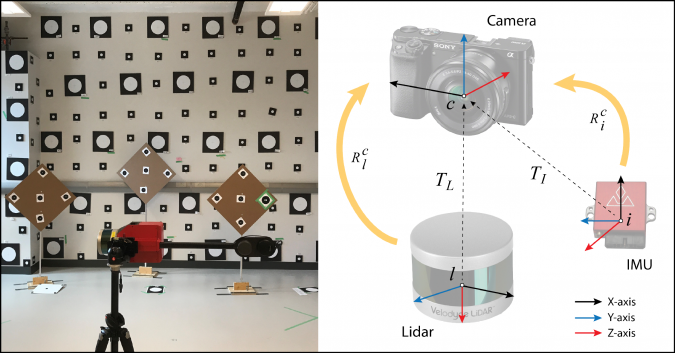
进行了三种基本类型的几何校准:内在相机校准,内在激光器校准和外在系统校准。内在摄像机校准涉及建模镜头径向扭曲,镜片偏转畸变,传感器和内部方向参数的亲和/非正常(主点偏移和焦距)。内在的LIDAR校准涉及为VLP-16中所有16激光束的范围零误差,水平圆尺度误差和垂直圆零索零误差的系统效果建模。系统校准,也称为“安装参数的平台校准”或“校准”,涉及在扫描仪和相机的局部坐标系之间测量旋转变换矩阵(钻孔瞄准矩阵)和翻译矢量(杠杆臂)。由于地理处理方法还需要INS RAW测量,因此应扩展系统校准,以建立相机和INS的本地坐标系之间的关系(图4,右图)。已经开发了一种软件解决方案,以使所有这些校准能够在室内环境中同时执行(图4,左侧)。为了测量校准的准确性,激光扫描仪点在两个验证特征(从自校准中未输入的平面)进行了考虑。在应用内在校准参数之前和之后,飞机安装在这些点。校准前的平面残留为0.008±0.006M。校准后,这降至0.005±0.003M。
结论
使用DSLR相机和工业级的低成本3D LIDAR传感器的集成允许创建高分辨率和完整的农业地块云和自动生成地形模型来测量土壤微型地形。通过集成校准确保数据的质量,该集成校准同时解决所有系统和LIDAR参数。通过此校准方法可以提高LIDAR观察的准确性。
与该系统的一个危急挑战是通过基于图像的点云的地理转移精度的准确性来地地理位置LIDAR点云。通过使用工业级GNSS辅助INS直接地地理,无法实现高精度。因此,作者提出了一种图像辅助惯性地理学方法,可以显着提高结果,消除了对局部任意坐标系中的结果的成本来实现昂贵的战术级GNSS惯性系统,除非可以准确的GCP确定了地理转移。
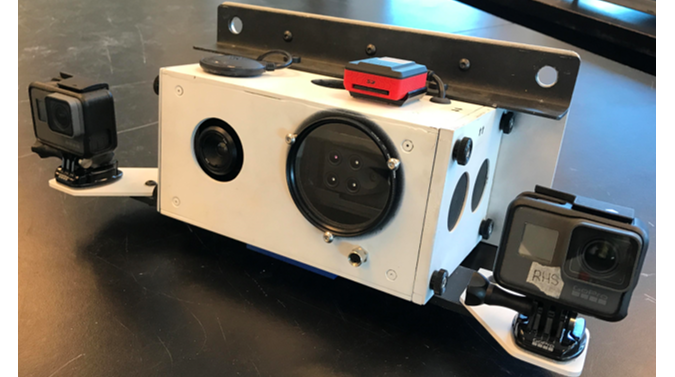
下一步将在实际条件下测试该系统。此外,系统将通过集成图5中的低成本内部多光谱解决方案进行扩展。该系统由热红外、近红外、红色、红边、绿色和三台RGB相机组成。利用额外的光谱波段,可以生成各种植被指数3D图,用于分析植物的生物物理属性,如叶片叶绿素指数、归一化植被指数、水分胁迫指数等。