obia和点云
机载激光雷达与基于目标的图像分析
是基于对象的图像分析(OBIA),适用于LIDAR点云的半自动分类吗?阅读更多关于有希望的前景。
基于目标的图像分析(OBIA)是为了提高传统的基于像素的多光谱图像分类的精度而发展起来的。在2000年前后引入,并在各种软件包中实现,如绝大多数识别, OBIA已成功应用于土地覆盖、森林和农业领域。如今,不仅可以获得高分辨率的多光谱图像,而且机载激光雷达捕捉到的高密度3D点云也越来越多。那么OBIA是否也适合激光雷达点云的半自动分类呢?
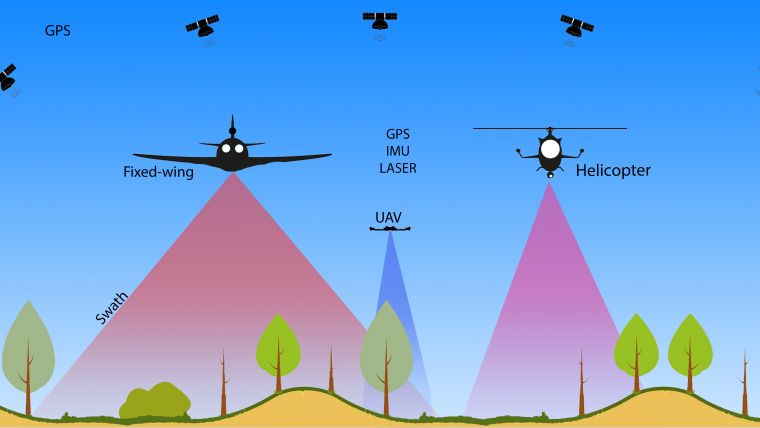
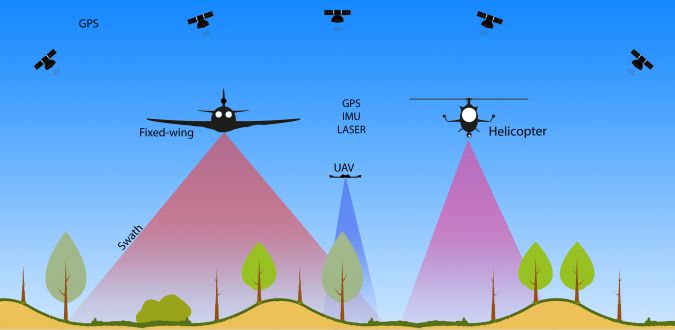
机载激光扫描仪(ALS)由各种传感器组成。激光测距仪发出脉冲来测量从传感器到脉冲击中地球表面的距离。为了传递距离到X,Y,Z坐标的传感器的姿态和位置,必须使用惯性测量单元(IMU)和一个精确的测量GNSS接收机在飞机上。通常也会成像传感器,比如RGB,高光谱,热或多光谱相机是在船上。直升机被用作在低空进行狭长地带测量的载体。它们可以悬停,从而提供点云密度高达200点/米2(图1)。固定翼系统适用于高海拔、覆盖大面积和捕捉低密度点云。以卫星为基础的系统是一个特殊的类别,相对罕见。
好处
广域系统提供适合作物危害分析,水文建模和洪水平面映射的矫正和轮廓一代的准确DEM。这些系统还提供有关树立架,生物质,挖掘卷的高度的信息,并支持其他自然资源管理任务。此外,它们能够映射运输和公用事业走廊以及城市地区,来自点云的3D模型能够实现视线研究,视图分析等等。直升机和无人机非常适合捕获传输线,以确定冠层的热额定值和高度。此外,从这些平台获取的点云是有利于监测铁路,高速公路,堤坝和管道。除了捕获线性对象之外,这些平台还适合在有限的范围内收集区域的点。使ALS点云的主要好处是一个非常有趣的空间数据来源(Vosselman&Maas,2010):
- 在全波形数字化的情况下,每个数据点都具有3D (X,Y,Z)位置、回波强度和回波宽度的信息,在大区域的数据采集速度非常快
- 高覆盖率使得在后期能够识别最初可能在现场遗漏的特征,同时可以很容易地收集精确的空间数据
- 高程由传感器直接测量,而不是对对物体类型、湿度等大气条件高度敏感的图像反射率值进行图像匹配
- 在植被地区和许多林业应用中,每个脉冲的多次返回被用作宝贵的信息来源。多重回报还可以让我们了解森林的垂直结构和复杂性。
除此之外,与图像相比,ALS系统通过脉冲可以通过顶篷看到脉冲可以穿透植被和其他半透明物体的小间隙,因此可以提供有关物体物理性质的额外信息。

OBIA
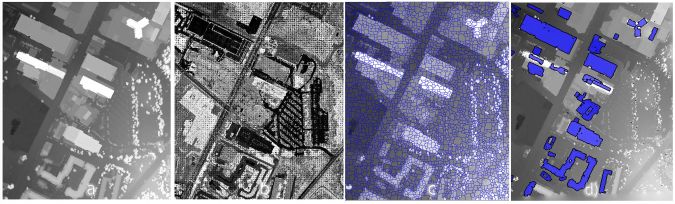
ALS收集由不规则分布的3D点组成的原始点云。这些点是几何特征,但本身没有意义,因为点云并不代表可分离和清晰描绘的对象的结构——它是一组固定在内部或现实世界的坐标系统中的点。人眼可以看到这些表示中的模式(图2),但计算机需要处理来分配类,并为相邻点组提供含义。图像的分类涉及到为像素分配主题类。所有的像素都具有相同的大小和形状,相邻的像素不知道它们是否属于同一对象。基于对象的图像分析(OBIA)通过将像素根据光谱或其他属性的相似性进行分组来分割图像。基本的假设是一个段构成一个对象或对象的一部分。然而,有时需要“过度分割”来分类复杂的物体,如由普通的烟囱和天窗组成的屋顶。
上下文是关键
当看到图2时,人们可能会认出建筑物。在他1982年的开创性著作中愿景,大卫·马尔向科学家提出挑战:“看到什么意味着什么?普通人的回答(亚里士多德的也是)是,通过观察知道哪里是什么。换句话说,视觉是一个从图像中发现世界上存在什么以及它在哪里的过程。”类似地,OBIA的目标是让计算机“看到”普通像素以外的东西——这些数据在现实世界中代表什么?背景是关键。遥感技术的进步与更高的空间分辨率相结合,允许进行包括OBIA在内的更“智能”的图像分析。根据朗(2008,六年级)“情报”包括在这种情况下:(1)一个先进的监督方式的界定和分类空间单元,(2)的内隐知识或经验集成,和(3)程度,研究结果有助于增加知识和更好地理解复杂的场景。迄今为止,地球科学领域的OBIA已被用于将卫星图像分割成有意义的图像对象,并通过空间、光谱和时间尺度评估其特征。与在现实世界中没有直接对应的像素相比,这些图像对象与现实世界中的对象更接近。我们希望实现的是语义上可解释的片段。 Such segmented imagery can be further processed by adding values to these objects or object candidates.
obia在点云上
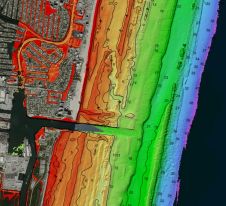
最近,研究人员开始将OBIA应用于点云。为了适合OBIA,点云通常必须从3D表示转换为以光栅或2.5D形式的2D表示,即每个网格单元添加一个高度值的光栅。这样的表示适合于进一步的分析(图3)。在返回的高度和或强度上相同的片段被用作分组和分类的输入。ALS点云不包含RGB值。由高度、单波束反射数和回波强度组成的原始数据可以通过其他来源的信息来丰富。OBIA利用大小、形状、位置和与其他段的关系,提高了分类结果。例如,轮廓为直线的片段表示建筑物或街道,而模糊和不规则的轮廓可能表示植被。因此,OBIA支持分层的多空间尺度方法,允许对人造或自然物体使用特征嵌套尺度。
例子
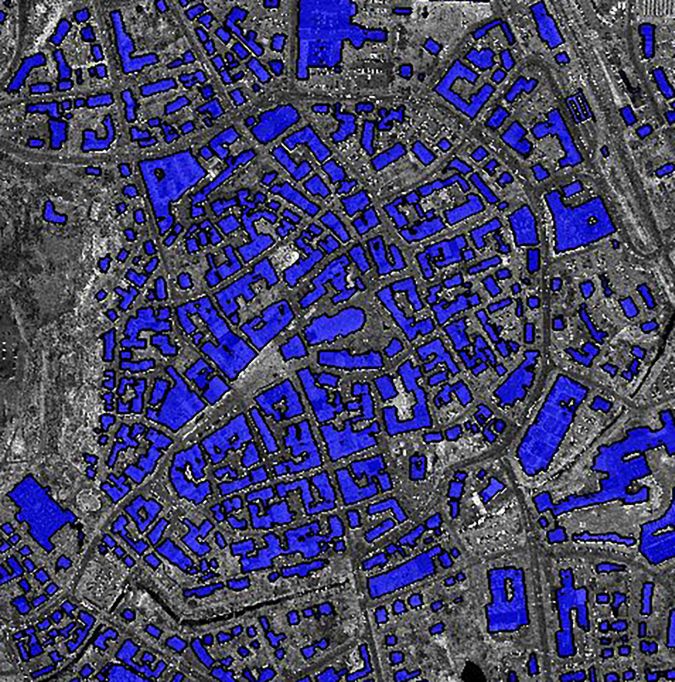
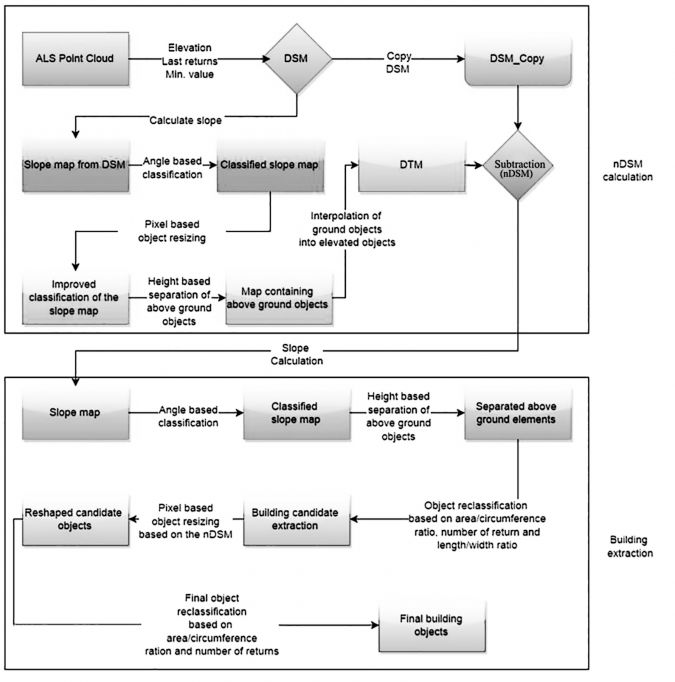
我们开发了一种使用认知网络语言(CNL)自动检测和概述建筑物的OBIA方法,是Ecognition内的模块化编程语言。该方法,其中整体流程图如图4所示,在部分地覆盖德国Biberach和DerRiß的历史城市中心,由Trimble提供并于2012年3月收集的Trimble Harrier 68i系统.点云占地面积2.5km2,由多个回波强度值组成,平均点密度为4.8点/m2.老城的特点是古老而紧凑的房屋,有些房屋有共用的墙壁。OBIA建筑提取方法的准确结果如图5所示。
结束言论
OBIA不仅为图像分类提供了良好的结果,而且非常适合从ALS点云中自动提取屋顶轮廓的2D多边形。