无人机上的多光谱和热传感器
精密养殖和热映射的能力
迷你和微型空中航空车(无人机)与成本效益和轻量级的RGB相机结合使用,已成为摄影测量任务的标准工具。相比之下,多光谱和热敏传感器直到最近太重而且笨重用于小无人机平台,即使他们的潜力几乎在十年前展示了。然而,如今,小无人机上的轻量级多光谱和热传感器可商购获得。阅读更多关于它们在精密养殖和热映射中使用的能力的更多信息。
(作者:Stephan Nebiker, Natalie Lack,瑞士)
作者的性能测试中的多光谱相机和热红外(TIR)传感器安装在Sensefly的eBee上。位于瑞士的Cheseaux-Lausanne,并于2009年成立,Sensefly制造Fixe-Wing UAV,并配备由Airinov开发的定制的轻量级相机,该机场位于法国巴黎。侧重于精密养殖,Airinov将佳能相机修改为多光谱传感器,并制造多光谱4C多光谱相机和Thermomap热红外传感器。本研究测试了CANON S110 NIR和MULTISPEC 4C的原型版本,两者都是多光谱相机,以及TIR传感器的HERMOMAP。
无人机和传感器
轻质固定翼eBee可以完全自动操作,几乎不需要任何驾驶技能,并且是覆盖较大区域的理想选择。EBEE系列与定制的传感器一起销售,可以由固定翼UAV的自动驾驶仪控制。CANON S110 RGB是一种低成本的彩色相机,CANON S110 NIR和S110 RE是低成本的多光谱相机,而MULTISPEC 4C是高端系统。佳能多光谱相机配有改进的拜耳滤色器 - 而不是记录蓝色,绿色和红色,绿色(G),红色(R)和近红外线(NIR)频带。需要只需要一个镜头,导致具有重叠光谱灵敏度的精确共同登记的光谱通道(图1)。相比之下,MultiSpec 4C具有四个镜头和四个单色CCD传感器;通过具有明确定义的中心频率和带宽的带式干扰滤波器在光学单元处发生颜色分离(图2)。Zenith看Panchromatic传感器使图像能够归一化。表1提供了上述传感器的细节。
传感器 财产 |
佳能 |
multiSPEC 4摄氏度 |
multiSPEC 4摄氏度 |
Thermomap. |
每个传感器的像素 |
12MP. |
4个传感器,每个0.4mp |
4个传感器,每个传感器1.2mp |
0.3mp. |
传感器尺寸[mm] |
7.44 x 5.58 |
4.51 x 2.88 |
4.8 x 3.6 |
10.88 x 8.70. |
像素大小(µm] |
1.33 |
3.75 |
17.0 |
|
GSD在100米AGL |
3.5cm. |
20厘米 |
10厘米 |
18.5cm. |
光谱通道 |
G(550) |
G(550±20) |
7000 - 16000 |
|
约。价格[欧元] |
900 |
原型 |
8,000 |
10,000 |
表1,测试中传感器的主要特征。
测试领域
Liebegg (AG, Switzerland)农业中心不同作物的试验田用佳能S110近红外光谱仪和multiSPEC 4C相机拍摄。为了确定最佳收获时间和与品种和处理有关的作物产量估计值,在油菜地上空飞行。第二项研究涵盖了几个领域,包括:
- 麦田用不同的肥料策略
- 一个有潜在真菌感染的甜菜根田
- 一个马铃薯田,目的是确定作物干燥的最佳时间和监测马铃薯枯萎病,这是一种毁灭性的疾病,导致爱尔兰马铃薯饥荒在19年中期th世纪
在每个领域中,建立了三到七个地面控制点(GCP),水平和垂直点精度为2cm。
数据
进行了总共24个航班,每个持续的20-40分钟并捕获40到900个图像,每个图像,接地采样距离(GSD)在2.5cm和10cm之间。由于其传感器尺寸和分辨率降低和高功耗,MultiSpec 4C原型显示了一些限制。用标准软件后期旱地三维3D进行了处理,包括:
- 图像方向/束块调整
- 通过密集图像匹配产生数字表面模型(DSM)
- OrthoImage发电和拼接
- 反射率图和植被指数的计算
在处理MultiSPEC数据之前,使用校准表的图像对各个通道进行辐射校准。图像方向的精度(1 σ)为0.2-0.3像素,相当于物体空间的1.5-4cm。
结果
将MultiSpec和Canon S110 NIR图像与由校准的便携式场光谱仪捕获的数据进行比较,其记录360-1000nm的范围,其光谱分辨率为3.3nm,并具有Zenith定向的参考通道。由于归一化差异植被指数(NDVI)基于反射率比[NDVI =(NIR-R)/(NIR + R)]不需要校准或归一化反射值。NDVI范围从-1到+1。平均来,MultiSpec 4C的NDVI值偏离-0.04从参考值。对于S110 NIR传感器,平均差异为-0.260。这种大值是由光谱通道中的重叠引起的。
以油菜试验田的NDVI值为基础,评价了油菜植株的生命力和估产潜力。尽管由于2014年夏天的恶劣天气,飞行计划被推迟了,而且只能在收获前几天进行,在单个物种之间,以及在有杀菌剂处理的地区和未处理的地区之间,可以检测到明显的活力差异(图3)。使用杀菌剂处理可以延长植物的活力,直到收获时间。经过处理的农田作物产量与NDVI值的归一化相关系数为0.78。未处理农田的系数计算为0.35。
热红外传感器
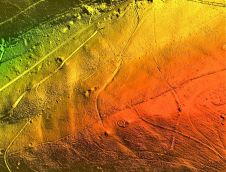
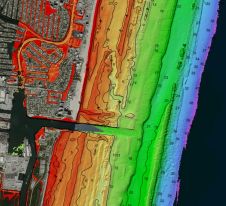
要确定Thermomap传感器的功能,请在2015年3月13日之前和之后进行两次活动。图像被捕获,GSD为15cm和30cm。为了使用致密图像匹配创建该区域的DSM,在白天期间使用CANON S110 RGB进行重叠的RGB图像,捕获具有5cm的GSD的图像。处理数据以获得具有15cm的GSD的TIR OrthoImages,使用RGB图像的PAN尖锐的TIR OrthoImage用于锐化,导致5cm的GSD,并且覆盖具有3D ReaveScape的TIR正交的DSM(图4).在这些第一次实验期间,Thermomap显示了固件问题,防止测量值转化为表面温度。然而,数据为建筑能源专家提供了有价值的信息。
结束语
高端多光谱传感器的高质量测量,不考虑照明,使它们适合监测植被,而不需要费力地获取野外光谱仪参考数据。低成本的多光谱传感器与厘米级的高GSD相结合,非常适合监测田间变化和探测植物病害,例如非常昂贵的特殊作物。
概述热,多电位和高光谱相机访问Geo-matching.com.

进一步阅读
- Nebiker,S.,Annen,A.,Scherrer,M.,Oesch,D。(2008)用于微无人机的轻量级多光谱传感器 - 非常高分辨率空气传播的机会。摄影测量,遥感和空间信息科学的国际档案.中国科学院地理科学与资源研究所。
- Nebiker,S.,缺乏,N.,Abächerli,M.,Läderach,S.(2016)来自无人机的多光谱和多型图像,用于预测粮食产量和检测植物疾病。要出现在:摄影测量,遥感和空间信息科学的国际档案.第十三届ISPRS大会,捷克布拉格。
作者
Stephan Nebiker现为瑞士西北应用科学大学测绘工程研究所摄影测量、遥感和地理信息学教授,主要研究方向为三维成像、移动测绘和基于无人机的摄影测量和遥感。
电子邮件:Stephan.nebiker@fhnw.ch.ch.
娜塔莉缺乏FHNW是一名高级研究员,专注于环境监测和无人机遥感。
电子邮件:natalie.lack@fhnw.ch
配图
图1,相对于绿色带(100%)归一化的CANON S110 NIR的光谱敏感性。
图2,与绿色带(100%)归一化的MultiSpec 4c的光谱敏感性。
图3,强奸试验领域(左)具有杀菌剂处理(橙色),无需治疗(蓝色)和来自MultiSpec 4C数据的NDVI地图,GSD 10cm。
图4,GSD为15cm的TIR正射影像(左),GSD为5cm的泛锐TIR正射影像(中),3D屋顶景观。