移动映射
精确到适合城市地区
移动地图系统可以快速准确地获取高度详细的地理数据。在建筑和布局迅速变化的城市地区尤其有益,传统的测量几乎不可能,而且不仅是在高峰时段。移动地图系统基本上由一辆装有定位传感器和激光扫描仪的车辆组成。它还可能安装了数码相机,如本文中描述的Topcon IP-S2,或其他传感器,如热传感器和探地雷达。
移动测绘系统(MMS)的核心是一个定位系统,它由一个集成了GNSS接收机和一个惯性测量单元(IMU)的定位系统组成。这种系统在市场上已经有一段时间了,可以安装在任何车辆上,以便对激光扫描仪、数码相机或其他传感器获取的地理数据进行直接地理参考。
丰富的数据
为了提高精度,可以将外部里程计安装在车辆车轮上;实际上,这些设备在城市地区是不可或缺的,因为在城市地区,由于建筑物和树木等高物体阻挡了卫星信号,GNSS的测量有时是不可能的。
所有设备都连接到一个控制单元上,并从该控制单元中对设备进行控制,这为操作人员在数据捕获过程中提供了便利。激光扫描仪可以收集数百万个点的三维坐标。将激光数据与近距离图像相结合,可以实现场景的三维虚拟现实,最好是由安装在同一车辆上的数码相机同时记录。由此产生的丰富数据可以在办公室中方便地处理,可以手动处理,也可以使用软件处理。
配置
通常MMS会配备激光扫描仪。最初,这些扫描仪只能在水平和垂直两个方向进行扫描,但目前的系统由多剖面扫描仪组成,垂直于移动方向进行动态扫描。激光扫描器的配置取决于扫描器的数量和类型,以及所需的输出。数码相机的数量及其在车辆上的位置主要取决于应用和从记录的图像中提取信息的首选方法。例如,通过立体视图手动处理图像需要另一种配置,而不是使用全景图像时需要的配置,或者根据相交点确定单个点的坐标。Topcon的IP-S2由一个控制单元组成,该控制单元通过以太网线连接到一台计算机上,该控制单元上连接有以下组件:
- GNSS接收机:数据速率10Hz, L1/L2 GPS + Glonass
- IMU:数据速率100Hz,陀螺偏置1°/小时
-两个外部里程表:每转10,000滴答
-三种激光扫描仪:扫描频率75Hz,典型扫描范围30m
-球面相机:最大帧率15张/秒,全景拼接分辨率5,400 x 2,700。
该系统还支持基于微机电系统(MEMS)技术的imu。最多可安装6个数码相机和6个激光扫描仪。每个设备的参数都是通过一个基于网络的界面来控制的。数码相机的两次曝光间隔可根据时间或行程距离设定。数据采集之前进行对准,目的是初始化IMU值并固定GNSS解决方案。定位过程应在GNSS覆盖较好的区域进行,以保证高质量定位。这一初始步骤可以在静止时(静态对齐)或与移动的汽车(运动学对齐)进行。后者需要在行驶过程中对车辆的航向进行较大的改变,并需要收集足够的数据来正确计算位置和方向。
在测量结束时,应重复校准程序以提高精度
在调查的开始和结束时,校准只需要几分钟,仔细地执行过程总是有回报的,因为不正确的校准可能会使数小时的测量变得无用。
后处理
IP-S2 MMS数据后处理可分为轨迹计算和采集数据处理。轨道计算使用所有来自GNSS接收机、IMU和里程计的数据。通过使用原始数据格式,可以提高图像的数据传输速率,每秒可以捕获多达数十张高分辨率图像。对后处理过程中生成的高分辨率全景图像计算外部方向参数。
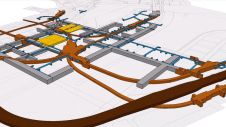
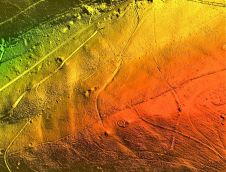
这些图像可以使用交叉摄影测量方法在PanoramaGIS软件包中进一步处理。图2(上)显示了车辆轨迹的正射影像图,由软件创建的摄像机投影中心(蓝点)组成。图2底部显示了用绿色标记的选定图像。这些都是自动检索软件通过鼠标点击的概述正射影像图。下一步包括附加位置,反射强度和颜色到每个激光点。在首选坐标系中的位置和强度由激光数据决定,而颜色则由图像决定。使用Topcon的空间工厂,可以在图像和/或由激光点创建的数字表面模型(DSM)中同时进行测量(图3)。
由于在图像中识别点比在激光点云中更容易,因此,例如,距离的确定是通过在图像中单击鼠标来完成的,而距离本身则是从DSM计算出来的。
系统的准确性
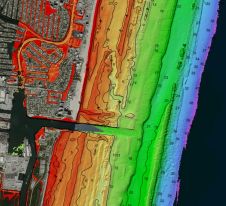
为了测试系统的精度,我们在后处理计算出的投影中心的z坐标面前设置了两条测试线,分别建在D2公路上,从D1公路与D1公路的交叉口到Blučina (DTM-1, DTM-2)。
DTM-1和DTM-2的精度均优于1cm。在长达40公里的范围内,每2.5米拍摄一次图像。DTM-1与1,514个投影中心进行比较,DTM-2与1,555个投影中心进行比较,确保有足够大的数据集进行精度计算。假设相机高度在高速公路上行驶时保持不变,这个恒定值可以从投影中心的z坐标中减去。所得到的值表示地面上投影中心的z坐标,因此这些值应该等于测试线的z坐标。图4显示了生成的直方图。与DTM-1对抗的标准偏差为2cm,而对于DTM-2,这个值为2.8cm:对于开放和城市地区的大多数制图应用来说足够精确。
结束语
配备激光扫描仪和数码相机的移动地图系统能够高效和准确地捕捉道路标志、道路设施、公用事业网格和绿化。他们是优秀的
为城市规划收集地理数据和城市三维建模的方法
可视化。