移动激光雷达制图
速度快,精度高,密度大
当需要以超过航空摄影测量的精度和分辨率对大片区域进行测量时,移动激光雷达系统的使用就进入了场景,而使用静态激光雷达是不切实际的。Lynx移动地图捕捉高精度,高密度点,方便和精确的对象识别。
2006年,隶属于ASTM集团的意大利工程公司中科集团(Sineco S.p.A)开始与加拿大激光成像系统制造商Optech公司合作,开发一种移动激光雷达系统。第一个原型机在2007年初准备就绪,将两个ILRIS-3D激光扫描仪与一个定位和定位系统(Applanix POS LV 420)结合在一起。这一概念验证为LYNX移动地图的开发铺平了道路,这是一个完全集成的系统,运行速度可达100公里/小时。
要移动
两个定向激光雷达传感器、IMU和GPS天线安装在车辆顶部(图1);刚性安装确保了传感器、IMU和GPS天线之间的对齐和精度。由于必须准确知道两个Lidar传感器相对于Applanix POS系统的方向和位置,所以必须在安装到车辆上后对Lidar传感器进行校准。系统精度优于5cm,每个传感器每秒测量10万个点,分辨率高达1cm。视场为360°;也就是说,两个激光雷达传感器会扫描整个区域,尽量减少路边物体造成的阴影(图2)。
已然采用
IMU和GPS对于任何移动系统都是至关重要的,因为它们对数据进行地理定位是必要的。然而,对于地面移动系统来说,仅靠IMU和GPS是不够的,因为树木、建筑物和立交桥会造成GPS信号被屏蔽的时期。GPS中断期间需要辅助传感器和高级处理,这些是Applanix POS/LV 420的一部分。
这个定位和定位系统,可以实现对一个点的自动地理定位,包括一个距离测量仪器(DMI),除了精确的IMU和两个GPS天线。
标题计算
第二个GPS天线可用于高纬度地区的航向计算。DMI是一种安装在轮子上的旋转轴编码器,它可以测量直线距离,并帮助POS LV在GPS中断期间抑制漂移误差。当接收到的GPS信号质量较差时,这就有帮助了。当车辆停止时,DMI提供零速度更新。最关键的是,两个GPS接收器(IMU和DMI)产生的所有导航数据都要“紧密耦合处理”;也就是说,以综合的方式同时处理。激光雷达传感器和POS通过它们的时钟连接,因此应该谨慎地同步。
高速公路调查
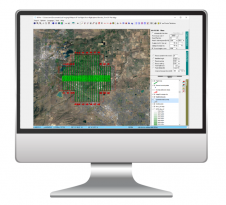
计划在连接Korinthos和希腊雅典的高速公路上进行新工程,包括建造一条新的连接高速公路和保护现有部分。2008年3月,我们对这条高速公路的60公里进行了测量,以创建包括路面、结构、斜坡和道路标志在内的主要特征的精确3D CAD重建(图3)。这条高速公路的两个行车道以平均50公里/小时的速度在3小时内进行了测量。相比之下,在2007年,用静态激光扫描仪扫描80公里的高速公路需要120个工作日全站仪.点云由9.8亿点组成,由WGS84/UTM34转换为希腊参考系统CGR87,最终平均点距为11cm。为了提高精确度,在走廊沿线每隔50至80米设置6个基站和地面控制点。最终点云精度在2cm以内。同时使用PolyWorks和Pointools进行数据处理。
城市建模
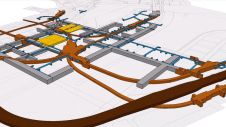
2008年1月,人们对英格兰的莱斯特历史地区进行了调查,以获得一些主要建筑的重建数据存档。狭窄的街道和高楼经常导致GPS中断,但DMI可以弥补GPS数据的不可用。交通堵塞使车速限制在每小时30公里。在20分钟的时间里,测量了5个街区,生成了1.44亿个点,点间距为4厘米。在邻近地区使用了一个全球定位系统基站。处理是使用Pointools完成的(图4)。
进一步的设施
从点云创建3d模型所需的软件需要更多的设备来减少人力。我们现在正致力于自动例程的特征提取和收集,自动截面创建和数据分割。
确认
感谢Michael Xinogalos, Astrolabe工程公司和Faraz Ravi。