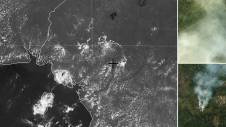
激光雷达测量在喀麦隆的多云天气
Dynamic Field of View Helps to Maintain Regular Swath
In Lidar surveys, minimizing flight time is the key to minimizing costs. Operators therefore carefully optimize parameters such as flight altitude, field of view and pulse repetition frequency to cover the survey area at the desired point density with the fewest flight lines. One parameter that they cannot plan for, however, is the weather. This article outlines how a dynamic field of view feature was used in a project in Cameroon to overcome the inability of Lidar laser beams to penetrate the persistent cloud cover.
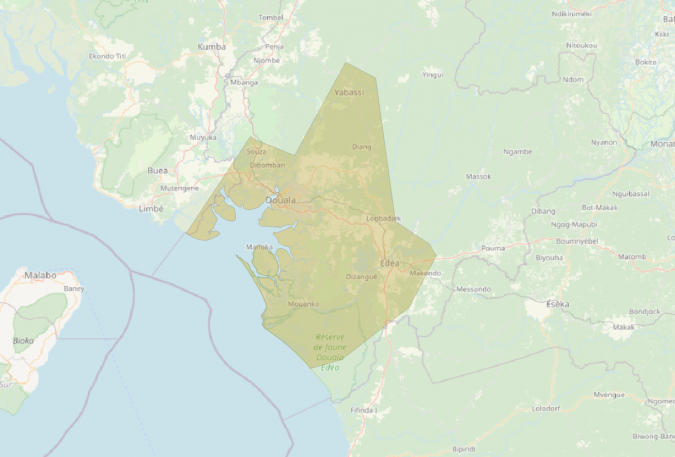
French survey company Société Topographie Informatique (STI) was contracted by the Communauté Urbaine de Douala (C.U.D.), a regional government body in Cameroon, to conduct Lidar and camera surveys for urban planning and floodplain management. Partially funded by Agence Française de Développement (AFD), the survey would cover a relatively wide expanse of 7,000km2, including Cameroon’s largest city and economic capital, Douala, plus areas with natural land cover and large dense forests.
Preparing for the Survey
In the acquisition phase, close to 200 hours of survey flight time was planned over a period of two months in 2021. The STI team installed a Teledyne OptechGalaxy PRIMELIDAR传感器和第一阶段IXU-RS 1000相机在加压的Bi-Turboprop Piper Cheyenne II XL飞机中,并优化了飞行计划。在等待正确的条件进行项目进行的同时,团队很快发现天气将是他们最大的挑战。STI项目负责人Bogdan Munceanu说:“我们面临的最大问题是低云层的形式似乎涵盖了整个区域。”喀麦隆位于非洲西部几内亚湾,通常被描述为“微型非洲”,因为它具有广阔大陆的所有主要气候和植被。不幸的是,对于球队来说,杜阿拉(Douala)一年中大约九个月都遭受了沉重的云掩护。海洋的湿度以及阴霾,灰尘和多年生的灌木丛会加剧这一点,从而导致城市及其周边地区的云覆盖率不断。这提出了一个问题,因为激光雷达的局限性之一是激光无法穿透密集的云覆盖物并达到目标。取而代之的是,云“争夺”了防止感兴趣的目标(在这种情况下为地面)可靠映射的光束。
Weathering the Challenges
Realizing the clouds were not going away, Munceanu was quick to accept that he had to find a workaround for the problem. “With this survey we did not have the luxury to say that the skies are not looking so great this morning so let us fly in the afternoon,” he said. “If we were lucky, we may have got half an hour of clear skies on rare occasions, but for the most part it was heavy clouds all day, every day. We could have waited for months and still not seen a whole day without dense cloud cover.”
“Our plan was to fly at an altitude of around 3,000ft (914m) above ground level (AGL),” Munceanu continued. “We recognized early on that the presence of the clouds would not allow us to stick to our flight plan. Once in the air, we would have to adjust the altitude depending on the altitude of the cloud. I figured if we stayed at the base of the cloud with varying adjustments of on average 300ft below the 3,000ft mark, we would be able to achieve the necessary results.”

与固定的视野(传统的传感器FOV), reducing the flight altitude in this way would have been a major challenge because the swath on the ground would get narrower, potentially creating gaps between flight lines that could be a basis for the client to reject the survey data. Instead, the operator would need to compensate for the narrow swath by packing the flight lines closer together – resulting in more flight lines, more survey time and more cost. STI, however, had a better option. “What helped us immensely was the Teledyne Optech PRIME’s SwathTRAK feature,” said Munceanu. “This allowed us to keep a regular swath on the ground even when we varied from our flight plan.”
动态的视野救援
为了保持激光雷达的束缚一致,该功能不断监视GNSS和IMU数据,以确定飞机是否偏离飞行计划。这样的偏差可能包括飞机的位置(太高,太低或太低或太远,距离飞行线的侧面)及其方向(过多的滚动,俯仰或蟹)。它还不断监视LiDAR报告的地面范围,以确定地面本身的高度是否在变化。通过结合此位置/方向和地面高程数据,该功能可以计算这些因素是否正在扭曲地面上的缘,并相应地调整扫描仪的FOV。
Teledyne Optech originally designedSwathTRAKfor high-relief terrain, where it could increase the FOV when flying over hills and reduce the FOV when flying over valleys, thereby keeping the swath at a constant width and improving operational efficiency and data consistency. Over the years, however, the feature has been further developed to handle many other conditions such as corridor mapping applications.
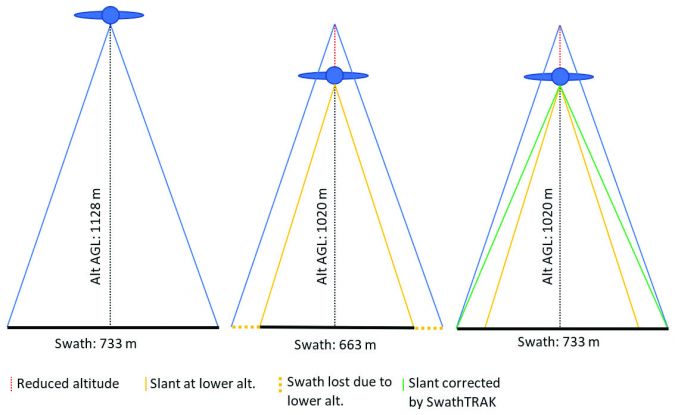
In this case, STI realized that this solution could also compensate when the aircraft itself (not the ground) was changing elevation. Thus, when the aircraft had to fly lower due to clouds, the FOV was widened to keep the width of the swath on the ground steady and avoid gaps between flight lines (see Figure 4). Notably, despite the reduction in altitude from 1,128m to 1,020m AGL, the operator was still able to get the full swath of 733m as the FOV expanded to achieve the planned coverage.
Thanks to this flexibility, the STI team did not have to replan based on ever-changing weather conditions since they were guaranteed that the sensor would deliver the planned swath width and density even if they had to fly lower than planned.
尽管有云
In practice, STI planned the surveys normally, setting the flight altitude to maximize productivity and cost efficiency, resulting in a 200-hour project. During each survey, the STI field crew (pilot and operator) adjusted their altitude to fly just below the cloud ceilings, relying on SwathTRAK to automatically compensate for the reduced altitude. That said, the operator did need to work within the hard limits of the technology during the flight planning phase. For this feature, the maximum scanner compensation is ±10° from the planned FOV, with a hard limit of ±30° from nadir (the Galaxy’s maximum FOV being 60°). For example, if the nominal FOV used is ±25° (a 50° full FOV), only ±5° is left for compensation. If the nominal FOV is ±20° (a 40° full FOV), the full ±10° can be utilized for compensation. Lastly, this solution only works for the Lidar, not the camera. Flying lower than planned still slightly decreased the footprint of the camera images on the ground, which could conceivably cause gaps between them. To avoid this, STI planned for plenty of sidelap between images.
平均而言,云覆盖迫使STI飞行约380英尺(120m)的高度,大约大约杜阿拉最云的日子低560英尺(170m)。如果没有动态FOV,STI将始终损失每项任务的20%的飞行线路,并且将花费大量时间在重新播放和后处理上,以避免/解释与差距和覆盖率降低有关的问题。借助动态FOV,操作员不必每天早晨浪费时间重新制定飞行计划,分析师能够简化数据,这是一致的覆盖范围和密度。
Despite the challenges posed by the clouds, the team flew every planned flight while maintaining the desired point density and an average absolute accuracy of 8cm off of ground control. STI’s client, who had accompanied the team on one of the flights and was familiar with the challenges posed by the local weather conditions, was very happy when presented with the final results. According to the team’s own estimate, without the flexibility of using SwathTRAK it would have taken twice the time and effort to complete the project. Ultimately, the Galaxy PRIME’s built-in feature enabled the project to be completed on schedule and on budget, despite the cloudy conditions.
Make your inbox more interesting.Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
Sign up for free