Lidar Point Cloud Segmentation
A Novel Framework for Processing Terrestrial Lidar Data
Terrestrial Lidar data has great potential to produce measurements for as-built building information modelling (BIM). Unfortunately, processing hundreds of millions of points, often contaminated by substantial noise, can be tedious and time-consuming. Normal variation analysis (Norvana) segmentation is an automatic method that can segment large terrestrial Lidar point clouds containing hundreds of millions of points within minutes.
Thanks to the high speed, point density and accuracy of modern terrestrial laser scanning (TLS), as-built BIM can be conducted with a high level of detail. But TLS captures not only useful geometric information but also unwanted objects, such as people, animals or vehicles moving across the scene (Figure 1). These unwanted points have to be removed and the data cleaning can be a tedious and time-consuming process, not least because of the use of 2D interfaces to interact with 3D data and the high point density. One of the most fundamental challenges is the discreteness of the points, because each point is an independent data record with limited information by itself. A point does not directly contain semantic information (i.e. what it is) or topological information (i.e. who its neighbours are). A common solution to reduce point cloud complexity is ‘segmentation’, i.e. the grouping together of neighbouring points into segments, because it is less complex to model and analyse segments than it is to process individual points.
Segmentation Issues
只要假设可以在数学上建模,点云分割就会简单。例如,通过使用仰角阈值可以简单地提取平坦的地板。然而,并不总是可以做出这样的简单假设,并且所做的更多假设,方法变得越少。此外,复杂的分析可能是耗时的,或者在涉及数亿点的大数据集时,计算甚至可以崩溃。在这种情况下,研究目标是提出一种解决方案,该解决方案可以作为一般预处理框架而没有特定假设,以便可以更广泛地应用该方法。

Norvana Segmentation
许多算法和软件包能够合理地划分点云。然而,在许多这些方法中,处理了数百万的TLS点可能会非常耗时。Norvana利用扫描模式来组织数据和执行分析。在实现中,遍历数据所需的时间是有限的,而该程序也被优化以通过将存储器(RAM)中的数据存储与用于处理和分析的搜索顺序对准来优化以更加缓存。NORVANA分段方法由两个步骤组成。首先,基于表面方向的快速变化提取对象之间的边缘。这是通过对扫描模式网格上的点和八个周围邻居之间观察到的正常矢量方差的评估来完成。然后将这些边缘包围的点分组成单个段(图2)。因为算法被设计为预处理步骤,所以已经删除了在任何维度中小于10cm的段以展示图2中的有效性。因为属于一个段的所有点可以作为单个对象处理。可以以基于对象的方式执行以下过程和分析,这导致更高的效率和鲁棒性。 For example, for those points captured on any people walking across the scene, one can select the corresponding segments manually and delete or mask them without having to tediously draw a fence to remove each unwanted object in the scene. Technical details can be found in Che and Olsen (2018).

Example
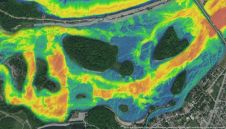
在图2中,将地板和壁适当地分割,并且天花板被分割成各个面板。图3的顶部示出了嵌入在包含具有非常高的细节水平的不同形状,方向和尺寸的壁中的墙壁上的展示壳体的特写镜头。框架和椅子,均在展示壳体的左侧分别与墙壁和地板正确分开。在展示案件的右侧,垂直宽法兰柱被分段为不同的部件(网和法兰)。由于Norvana认为扫描仪位置在估计正线时,同一法兰的每一侧都被隔离为单独的段而不是被合并到单个平面中,即使当法兰很薄(这是许多现有算法的常见故障)。这种强大的薄物体方法使得能够为各种各样的物体生成实体模型。楼梯是另一个重要的结构。楼梯被适当地分段为胎面和立管(图3,底部)。与平面表面相比,圆柱形物体需要更复杂的数学模型。常规和不规则形状的光滑表面易于分段(图4),因为正线仍然在表面上均匀变化。 In the example, the points on the straight pipe have been correctly extracted and could subsequently be modelled as a cylinder. Also, complex objects such as the elbow have been segmented. Notably, pipes of different sizes and orientations are extracted using the same parameters. However, a limitation of this algorithm is that very rough surfaces cannot be extracted as a single segment.

Computational Considerations
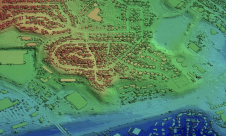
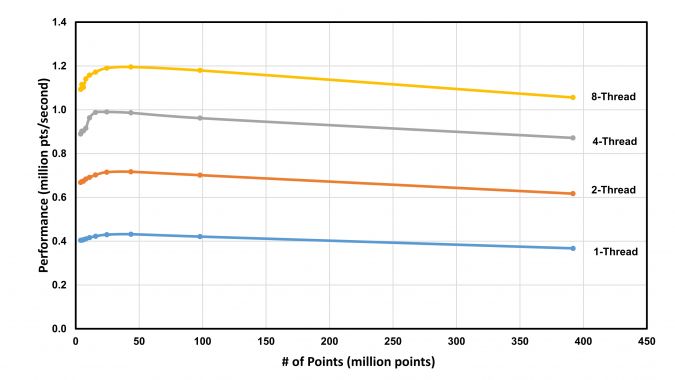
Structuring of the data in the scan pattern grid enables the use of parallel programming so that multiple threads on the CPU can process different portions simultaneously. The approach was benchmarked on an outdoor dataset down-sampled at different rates with a different number of threads using a desktop computer with a low-end CPU (Intel Xeon CPU E5620 @ 2.40GHz, released in 2010). Efficiency is not significantly affected by the number of points at the scales tested (Figure 5). The performance is consistent at over one million points per second using eight threads during the processing of nearly 400 million points.
Concluding Remarks
In the future, the plan is to increase the functionality of Norvana by including classification, modelling and other modules.

Further Reading
- Che, E., Olsen, M.J., 2018. Multi-scan segmentation of terrestrial laser scanning data based on normal variation analysis.ISPRS Journal of Photogrammetry and Remote Sensing。143,pp。233-248。
- http://research.engr.oregonstate.edu/lidar/pointcloud/OSUCampus/Kearney_Norvana_2018/index.html
Make your inbox more interesting.Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
Sign up for free