文章
激光雷达
这一期的GIM主要致力于新兴的激光雷达技术。我们有一个关于激光雷达数据的3d可视化的特写,由印度坎普尔理工学院的新特约编辑Bharat Lohani博士共同撰写,以及不少于两个产品调查,一个关于机载激光雷达系统,另一个关于激光雷达软件。本月的两个常规专题《焦点科技》(Technology in Focus)和《公司视野》(Company’s View)将讨论激光雷达调查产品点云的处理。激光雷达无疑是一种最成功的数据采集技术。作为Light Detection(光探测)和Ranging(测距)的首字母缩写——有些人更喜欢把Lidar读作Laser Imaging Detection(激光成像探测)和Ranging(测距)——这个词已经成为一个“专有名称”,拼写和你自己的名字一样,首字母唯一大写。
有益的特性
虽然激光雷达作为一种作战系统的兴起仅仅始于十年前,但它的历史可以追溯到60年代首次试用的时候。在20世纪70年代,实验系统被开发出来。精确定位一直是一个瓶颈,直到90年代初,GPS成为一种可靠、稳定和精确的定位技术。今天,激光雷达被认为是一种具有许多有益特点的先进技术:高数据捕获率(高达100平方公里/小时)和自动化水平,甚至可以实现现实世界的3d重建。激光雷达还具有每点成本低、精度高和高水平的细节(每平方公里可达数百万点),而最终的解决方案在很大程度上不受地形类型、特征和日光/天气条件的影响。
数以百万计的分
机载激光雷达系统是多传感器的,通常由一个无反射器的激光传感器、一个定位系统和一个数码相机组成。激光传感器通过测量脉冲序列的传输(每秒25万次脉冲!)和信号返回之间的时间间隔来确定平台到地球表面任意点的距离。旋转或章动镜使扫描垂直于飞行方向。为了补偿机械的不稳定性和保证恒定的对准,玻璃纤维光学可以安装在镜子的前面。定位系统需要将距离测量转换为三维地形坐标,该系统由GPS和惯性测量单元(IMU)两个耦合的主要部分组成。GPS的目的是测量激光传感器的位置。采样频率在几个赫兹的数量级。IMU,也被称为惯性制导系统(IGS),使用加速度计和陀螺仪的组合来检测加速度和姿态的变化率;后者通常定义为俯仰、滚转和偏航。位置是通过加速度沿三垂直轴的两次积分来计算的。 Accumulation of measurement errors means an IMU suffers from drift, resulting in discrepancy between its true and apparent position. IMU positions are, however, not useless: since sampling frequency lies in the order of several hundreds of Herz, IMU positions may fill GPS gaps. To compensate for drift, IMU position is updated every time a GPS position becomes available. Integration of GPS and IMU measurements is done using Kalman filter technology. In contrast to GPS, IMU does not require external aid. As an autonomous system it is immune to any interference from the outside world, such as jamming. Integration of the two systems improves accuracy of positioning and precision.
真实的世界
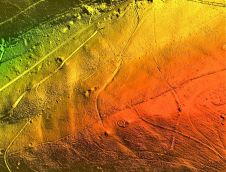
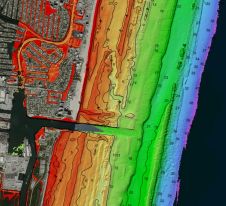
根据系统、飞行高度、速度和立交桥的数量,点密度可以达到每平方米几十个。直升机更适合高分辨率的覆盖,因为它们可以很容易地限制它们的速度。由于激光雷达是主动系统,数据采集不受太阳光照影响,不会产生阴影。天气和能见度只对飞行测量有轻微影响。在纹理变化小的地区,如海滩和沙丘,可以毫不费力地获得高度值。光谱中近红外部分的波长(通常为900nm、1060nm和1500nm)是非穿透性的,因此脉冲会被林分树叶和其他植被反射。由于足迹的范围有限(典型的波束发散是几毫向径向到亚毫向径向),如果植被不是太密集,一些信号可能会到达地面。因此,返回信号的最后一部分可能表示到地面的距离,第一部分可能表示冠层高度。一些系统,除了返回信号的第一部分和/或最后一部分,收集4或8个样本,甚至整个返回脉冲,可以确定垂直表面结构,如粗糙度、物体的高度和形状、冠层密度和树木的高度,以及反射率。
调整
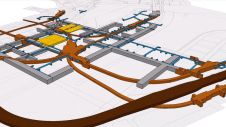
当与其他数据集如航空和卫星图像和地形数据相结合时,激光雷达数据的价值似乎具有充分的优势。激光雷达为基础设施工程的所有阶段提供有用的信息,例如走廊规划、环境影响模拟、土方工程的最佳移动、确定(铁路)道路变形和探测障碍物(如风暴后倒下的树木)。激光雷达还提供了创建3d -数字城市模型和电力线路空中监测的信息。其他应用包括洪水灾害区划、河流洪水模型和灾后损失评估。激光雷达的精度和分辨率是如此之高,以至于地球科学家显然被迫调整他们的侵蚀和漫滩模型。
有益的特性
虽然激光雷达作为一种作战系统的兴起仅仅始于十年前,但它的历史可以追溯到60年代首次试用的时候。在20世纪70年代,实验系统被开发出来。精确定位一直是一个瓶颈,直到90年代初,GPS成为一种可靠、稳定和精确的定位技术。今天,激光雷达被认为是一种具有许多有益特点的先进技术:高数据捕获率(高达100平方公里/小时)和自动化水平,甚至可以实现现实世界的3d重建。激光雷达还具有每点成本低、精度高和高水平的细节(每平方公里可达数百万点),而最终的解决方案在很大程度上不受地形类型、特征和日光/天气条件的影响。
数以百万计的分
机载激光雷达系统是多传感器的,通常由一个无反射器的激光传感器、一个定位系统和一个数码相机组成。激光传感器通过测量脉冲序列的传输(每秒25万次脉冲!)和信号返回之间的时间间隔来确定平台到地球表面任意点的距离。旋转或章动镜使扫描垂直于飞行方向。为了补偿机械的不稳定性和保证恒定的对准,玻璃纤维光学可以安装在镜子的前面。定位系统需要将距离测量转换为三维地形坐标,该系统由GPS和惯性测量单元(IMU)两个耦合的主要部分组成。GPS的目的是测量激光传感器的位置。采样频率在几个赫兹的数量级。IMU,也被称为惯性制导系统(IGS),使用加速度计和陀螺仪的组合来检测加速度和姿态的变化率;后者通常定义为俯仰、滚转和偏航。位置是通过加速度沿三垂直轴的两次积分来计算的。 Accumulation of measurement errors means an IMU suffers from drift, resulting in discrepancy between its true and apparent position. IMU positions are, however, not useless: since sampling frequency lies in the order of several hundreds of Herz, IMU positions may fill GPS gaps. To compensate for drift, IMU position is updated every time a GPS position becomes available. Integration of GPS and IMU measurements is done using Kalman filter technology. In contrast to GPS, IMU does not require external aid. As an autonomous system it is immune to any interference from the outside world, such as jamming. Integration of the two systems improves accuracy of positioning and precision.
真实的世界
根据系统、飞行高度、速度和立交桥的数量,点密度可以达到每平方米几十个。直升机更适合高分辨率的覆盖,因为它们可以很容易地限制它们的速度。由于激光雷达是主动系统,数据采集不受太阳光照影响,不会产生阴影。天气和能见度只对飞行测量有轻微影响。在纹理变化小的地区,如海滩和沙丘,可以毫不费力地获得高度值。光谱中近红外部分的波长(通常为900nm、1060nm和1500nm)是非穿透性的,因此脉冲会被林分树叶和其他植被反射。由于足迹的范围有限(典型的波束发散是几毫向径向到亚毫向径向),如果植被不是太密集,一些信号可能会到达地面。因此,返回信号的最后一部分可能表示到地面的距离,第一部分可能表示冠层高度。一些系统,除了返回信号的第一部分和/或最后一部分,收集4或8个样本,甚至整个返回脉冲,可以确定垂直表面结构,如粗糙度、物体的高度和形状、冠层密度和树木的高度,以及反射率。
调整
当与其他数据集如航空和卫星图像和地形数据相结合时,激光雷达数据的价值似乎具有充分的优势。激光雷达为基础设施工程的所有阶段提供有用的信息,例如走廊规划、环境影响模拟、土方工程的最佳移动、确定(铁路)道路变形和探测障碍物(如风暴后倒下的树木)。激光雷达还提供了创建3d -数字城市模型和电力线路空中监测的信息。其他应用包括洪水灾害区划、河流洪水模型和灾后损失评估。激光雷达的精度和分辨率是如此之高,以至于地球科学家显然被迫调整他们的侵蚀和漫滩模型。