高精度激光扫描洞穴旅游
意大利波莱拉洞穴的3D重建
波莱拉洞穴位于意大利利古里亚地区,是一项旨在改善和促进该地区旅游业的战略的主题。在这个项目中,需要对一些更容易进入的洞穴房间进行3D激光扫描,以创建多媒体产品,如用于3D虚拟旅游的电影、图像和场景,并为游客游览生成地理制图产品。为了实现这一点,洞穴被扫描使用Z+F成像仪5010高精度激光扫描仪。由于地下环境,测量和数据处理被证明是特别困难和昂贵的,但通过使用免费和开源软件成功地生成了一个完全纹理的3D模型。
测量规划与激光扫描
在正常情况下Z + F成像仪5010激光扫描仪(图1)可以在每个点上获得毫米精度,通常用于建筑应用。他们没有计划进行地形调查(这会导致相当大的后勤困难),而是根据洞穴地图和洞穴学家的经验战略性地选择了调查地点的位置和数量。尽管仔细规划了扫描位置,但在一些地方几乎不可能建立一个合适的位置。为了探测整个洞穴表面,总共需要11次高分辨率和高质量的扫描。

三维激光扫描
由于单独的扫描最终会合并成一个单一的3D模型,并且由于自然参考点在洞穴环境中并不明显,为了帮助点云配准,放置了物理参考目标(特殊支撑支架)。由于洞穴的特殊和复杂的构造,只有少数目标被放置在容易到达的位置,以便在多次扫描时可以看到它们。
点云注册
用仪器自带的Z+F激光控制软件对11次扫描得到的点云进行配准。当场景几何结构很简单时(如在城市中),很容易匹配两次扫描。然而,在更复杂的几何情况下,如在洞穴中,需要选择更明显和可区分的连接点作为匹配点云的第一种方法。不幸的是,在这种情况下,一些参考目标不容易识别或从多次扫描中可见,而且由于实际的限制,它们大多数被放置在相同的高度。为了减轻这种影响,特定的自然洞穴特征(如小岩石或其他明显的洞穴特征)被仔细地确定为额外的目标。整个项目注册的平均误差为6cm。

创建网格
使用注册点云生成三维网格。在这个项目中,比较了两种不同类型的开源软件,MeshLab和Cloud Compare的结果。这两种类型的软件都被设计用来处理和管理点云和网格,但是MeshLab是面向网格工作的,而CloudCompare更适合处理点云。虽然从点云生成网格有很多算法,但我们决定使用泊松算法,因为它在两种类型的软件中都存在。使用注册的点云,使用MeshLab创建一个网格。为了验证这个网格并查看算法是否以相同的方式工作,CloudCompare使用相同的点云创建了第二个网格。这也有助于验证是否可以只使用一种类型的软件来优化整个过程。
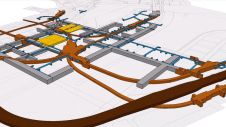
为了在CloudCompare中生成网格,需要设置的最重要的参数是八叉树深度和每个节点的样本。八叉树深度是用于表面重建的树的最大深度;更高的数字意味着更高的重构精度,但也意味着更高的处理时间(图2)。“每个节点的样本”指定了应该落在一个八叉树节点内的样本点的最小数量。小的值可以用于无噪声的样本,但对于有噪声的样本,可能需要更大的值来提供更平滑的重构。在本例中,由于取了点的子样本,因此假设该样本是无噪声的。
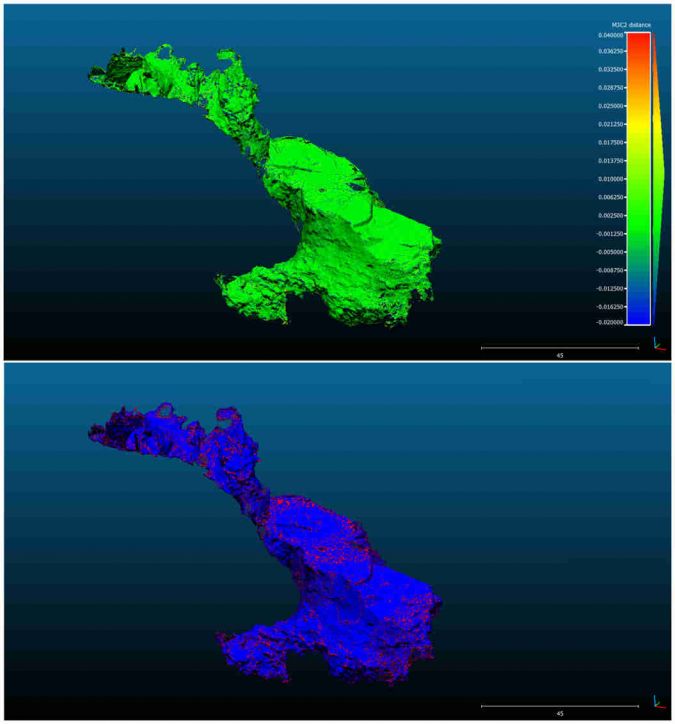
比较网格
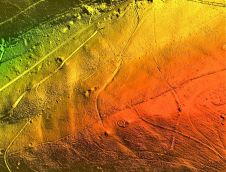
在CloudCompare环境中,将MeshLab网格与CloudCompare网格进行比较(图3)。CloudCompare使用两个不同网格的顶点和两个工具来测量差异。首先,M3C2插件计算参考云(MeshLab网格顶点)和CloudCompare网格顶点之间的签名距离。距离的主要参数可以通过“param guess”来获得,以设置标准尺度(以确定一个圆柱体的方向,在其中比较的云中的等效点将被搜索)、投影尺度(圆柱体的直径)和最大值。深度(气缸高度)参数。以整个MeshLab顶点云作为核心点,计算整个云中的距离。在这种情况下,我们决定计算两种不同的距离:一个使用默认法线(使用法线比例参数),另一个使用垂直方向法线,在洞穴的伪2D区域。计算出的距离为厘米数量级。
C2M工具为比较云的每个点在参考网格中搜索最近的三角形。网格提供了使用法线的信息,因此云网格距离有一个符号(+或-)存储为比较云中的标量场;它们也可以沿着3个主轴(X、Y和Z)拆分,生成3个标量场,每个轴一个。为了得到更容易解释的不同网格之间的比较,提取了三维模型和二维截面的部分。使用线段工具同时切割天花板(平台上方)、平台(内部)、入口和滑道上的两个点云,生成3D部分。使用M3C2、正常默认和垂直正常以及C2M工具计算真实距离。
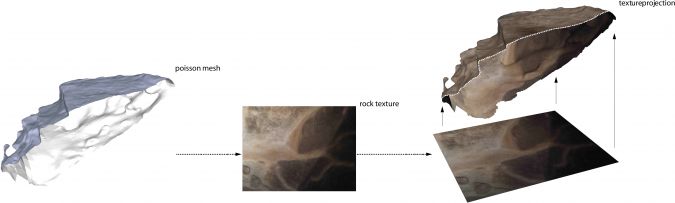
洞穴图像投影
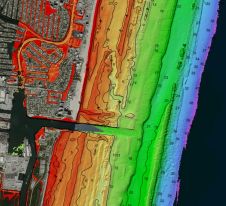
使用SketchUp将洞穴表面的图像作为纹理添加到网格中,从而增强了可视化效果(图4)。这个过程应该对需要覆盖的每一个表面区域进行处理,这意味着更多的照片覆盖将导致更好的可视化效果。最好是对洞穴表面(天花板、地面和墙壁)进行狭窄的重叠拍摄。洞穴的每一个表面都应该分批拍摄,并且应该用垂直于表面的镜头拍摄,以尽量减少失真。
结论
这次经历的结果是,MeshLab看起来不那么直观,但提供了比CloudCompare更大范围的过滤器、有用的插件和处理工具,CloudCompare是一个更快、更容易操作甚至巨大点云的环境。使用四种不同类型的软件(Z+F LaserControl, MeshLab, CloudCompare和SketchUp)进行后期处理是一个理想的解决方案,从注册到创建一个纹理3D模型。一个建议的解决方案,为未来的组成,以最高的分辨率进行扫描,仅用于注册阶段。然后,为了在网格重建中获得合理的处理时间,重新采样点云是有用的,只保留10个数据点中的1或2个。