
建立非常高分辨率的卫星数据地表模型
与ISPRS激光雷达基准数据的比较
数字地表模型(DSM)是一种通用的摄影测量产品,在测绘和地理信息系统(GIS)领域得到了广泛的应用。根据H. Hirschmüller在2005年发明的半全局匹配(SGM)算法,立体对是逐像素匹配的,导致了非常密集的DSM。非常高分辨率的卫星(VHRS)成像传感器提供高达0.3m地面采样距离(GSD)的立体图像。VHRS数据的主要优点是数据覆盖范围比传统机载数据大得多。因此,VHRS图像是一个很有前途的选择,以生成三维点云和dsm。最近的一项研究将其与ISPRS激光雷达基准数据进行了比较。
为了验证VHRS算法,ISPRS关于光学星载传感器几何和辐射建模的第I/4工作组提供了加泰罗尼亚(西班牙)一个地区的VHRS基准数据集。基准数据由加泰罗尼亚制图研究所(ICC)进行激光扫描,并作为参考数据集。
斯图加特大学摄影测量研究所使用他们自己的处理算法,将0.5m GSD的Worldview-1 (WV-1)数据集应用到ISPRS基准。该数据采集于2008年8月29日,立体声角度为35对。该数据集包含三个不同的区域:La Mola、Terrassa和Canarisses。对于每个区域,立体图像的大小大约为8,000 x 8,000像素。这些地区包括农村、城市、森林、平原和山区。所有数据都是在1B级提供的,该级别提供了大气顶部(TOA)辐射亮度值和传感器几何形状的辐射校正图像。数据包含相应的有理多项式系数(RPC)文件,该文件描述了卫星轨道的外部方向。
处理vhr数据
所使用的算法被实现为一个自动管道来生成点云和dsm。通常,第一个过程是基于RPC的bundle块调整,但是,因为基准测试数据集的RPC文件的方向已经可用,所以实际的第一个步骤是反向重采样。在极点重采样中,对应点位于文件的同一行,从而减少了计算时间和内存占用。在标准的航空相机几何结构中,外极点都在一条直线上。然而,在VHRS图像中,它们更像是双曲线。
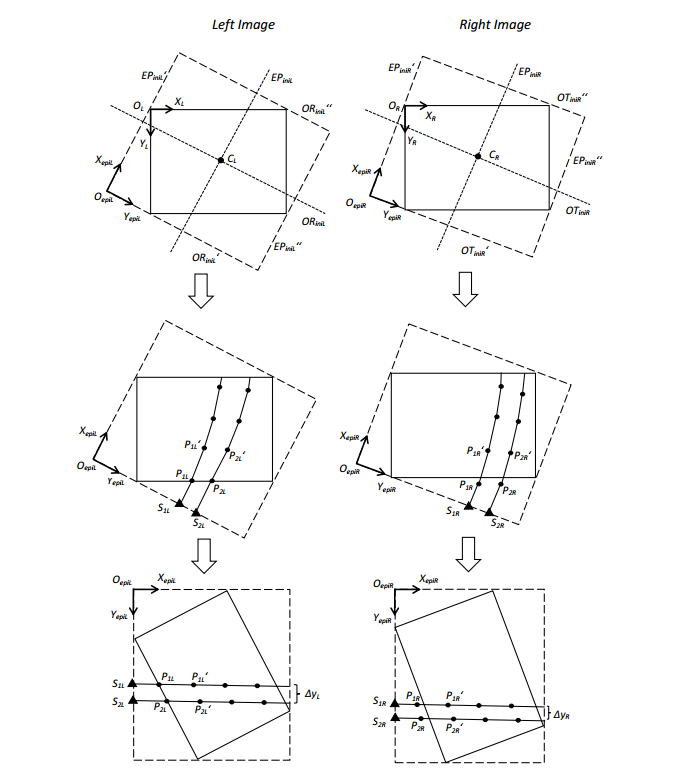
为了逼近双曲线,我们采用了基于J. Oh研究的一种改进的分段极极重采样方法(图1)。在这种重采样方法中,需要执行很多步骤。第一步是定义立体外极图像的坐标系。左图像的中心点用于计算初始外极曲线及其正交线的方向。下一步是确定从左图像的底部边界生成外极曲线对的起点。根据VHRS图像外极曲线的特点,采用投影-轨迹法逼近局部外极曲线。对于图像内的外极线段,给定预定义的线段长度,如果达到预定义的长度,将生成一个新的外极线段。在最后一步中,立体图像沿着极线段重新采样。

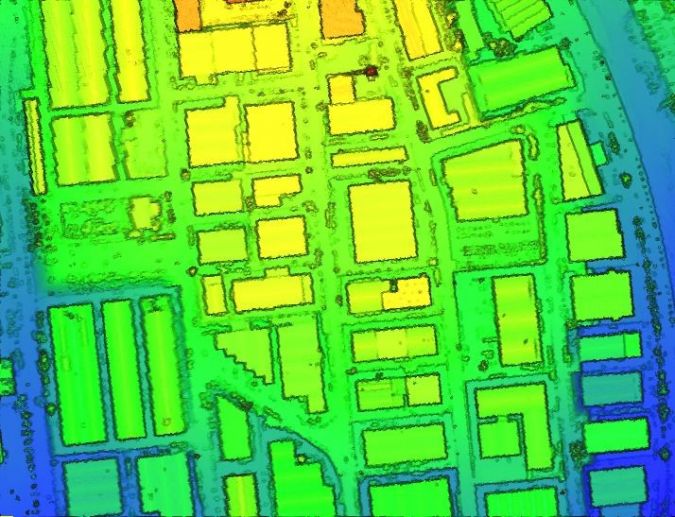
稠密图像匹配现在是基于重采样的极线立体视觉对。将C/ c++库LibTsgm应用于逐像素匹配的处理流程中。LibTsgm采用了改进的SGM方法,由斯图加特大学摄影测量研究所开发,并于2013年外包给斯图加特的nFrames GmbH。稠密图像匹配完成后,计算三维点云;从这些点云中,以1m的GSD生成dsm。为了更好的可视化,CloudCompare对点云进行了网格化(图2)。
点云精度
为了研究三维重建管道的性能,我们从点云中提取了三种不同类型的地形(样本)以显示更详细的信息(图3):a)山地林区,b)平坦的乡村地区,c)城市地区。VHRS数据的点云总体上比参考激光雷达的点云粗。将提取的dsm与参考激光雷达点云进行比较。将处理后的WV-1 DSM与Lidar点云的高度进行比较,并据此创建差值图。
利用卫星数据很好地重建了山地森林的基本地形,大部分高差小于2.5m。在平坦的农村地区,一些细节特征在VHRS点云中缺失,但总体高度差在亚米水平。在城市地区,Lidar点云中的建筑比VHRS数据中的边缘更清晰,大部分细节缺失,尽管WV-1的点云可以重建屋顶上的一些细节。在城市地区,大多数高差小于2米。
对精度的进一步研究表明,总体精度受到景物阴影的影响。因此,在平坦的乡村地区的准确性是最好的,因为有最小的阴影。这些建筑产生了许多阴影,影响了它们的重建和准确性。山地林区的精度受树木阴影和陡峭的高度变化的影响。
DSM的准确性
将激光雷达点云处理成参考DSM,以便与VHRS的DSM进行比较。为了评估三维重建的准确性,根据dsm的高度差计算出均方根误差(RMSE)。由此可见,La Mola试验场的RMSE约为3.1m, Terrassa试验场的RMSE约为2.8m, canaris试验场的RMSE约为3.4m。Terrassa试验场有更好的均方根误差,因为它有更多的平坦区域。
对于稳健估计,计算了两个dsm之间的归一化中位数偏差(NMAD)。也取相应的68%和95%的绝对误差分位数。高度差的分布被描述为每个测试点的直方图。NMAD在0.8 - 1.4m之间变化,其中68%在1.4 - 1.9m之间变化,95%在7.0 - 8.3m之间变化(表1)。
测试网站 |
NMAD [m] |
68% [m] |
95% [m] |
RMSE [m] |
通勤 |
0.8 |
1.0 |
7.0 |
2.8 |
La翻车鲀 |
1.4 |
1.8 |
7.7 |
3.1 |
Canarisses |
1.4 |
1.9 |
8.3 |
3.4 |
表1 DSM比较概述。
结论
对(V)HRS数据进行自动三维重建的方法进行了验证,结果表明该方法具有较好的准确性和鲁棒性。生成的三维点云和dsm非常密集,重建了测试点的主要纹理信息。由于阴影和低冗余度的影响,DSM存在一些异常值,建筑物边缘不清晰。如果在未来的工作中应用更高分辨率的数据(如0.3m GSD卫星图像)和多视角图像,可能会获得更好的结果。























