
内置相机的彩色点云
墙壁、天花板和地板的自动着色
地面激光扫描仪配备内置摄像机,非常适合识别建筑物内部点云的表面。图像中的颜色可以自动投射到平面结构上,形成房间、大厅、走廊、楼梯间和其他室内空间的纹理3D模型。除此之外,利用计算机视觉方法,插座、开关和其他附着在墙上的物体可以在3D模型中自动识别,并确定它们的x、y、z位置。本文介绍了一个案例研究。
许多地面激光扫描仪(TLSs)不仅可以获取距离测量值,从而计算出点的三维坐标,而且还配备了内置的RGB相机,可以产生球形全景RGB图像。
扫描仪
配备内置摄像头的TLS设备之一是Faro Focus 3D扫描仪,该设备已在本案例研究中使用(图1)。该设备重4.2公斤,每秒可测量近100万个点。内置800万像素摄像头捕捉RGB图像,这使得自动分配颜色到点云的每一个点成为可能。高动态范围(High dynamic range, HDR)技术是一种捕捉具有多个曝光率的图像并将其合并成单一图像的技术。HDR相机即使在光线不好的情况下也能捕捉图像,使表面在黑暗或明亮的区域都能看到。生成的图像提供了球形全景RGB视图。
假设
使用激光扫描仪和球形摄像机的串联,使自动分配自然颜色信息到点云中的每一个点成为可能。然而,当从点云构建三维模型时,并不是所有的点都同样有用。例如,当一个人想要为墙壁、天花板和地板建模时,从家具、花盆和咖啡杯中回收的东西是多余的。自动化过程应该考虑到不相关点的存在,这种方法需要一些假设。其中之一是,墙壁、地板和天花板可以几何建模为平面结构,在至少一次扫描中可见,具有足够高的点密度。此外,所有点云和图像必须在同一坐标系统中配准,具有统一的比例尺。进一步的假设是,垂直方向是已知的,当内部由多个空间组成时,墙壁的厚度也是已知的。
数据采集和三维建模
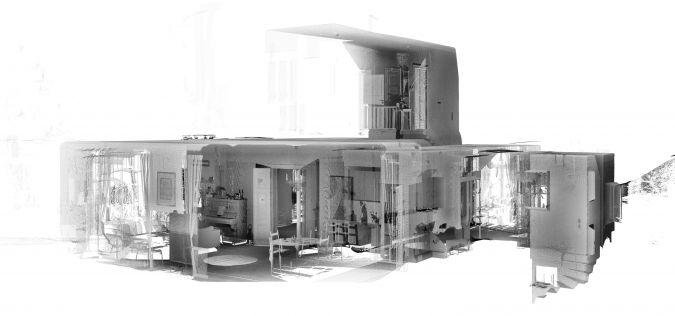
七室内空间从七个扫描点云扫描位置导致7700万点(图2)。注册后的点云旨在将一起分在同一坐标系中,第一次的粗3 d模型内部已经手动创建从一个低分辨率的网格。这导致了一个没有门窗的房间表面的线框形式的几何轮廓(图3)。为了有效地为表面分配颜色,粗糙的线框必须被细化。为此,作者开发了一个自动程序来检测矩形平面分组类似的面向三角形在同一平面。从每个面向相似三角形的平面中,确定最小的矩形贴片。接下来,每个patch被细分为具有预定义分辨率的像素,例如1mm,并为其分配颜色。这是从最近的扫描获得的,该扫描通过将像素和扫描仪与全景图像连接起来的线相交来捕获patch。当然,在连接像素和扫描器的线路上,像素可能会被家具和其他物体遮挡。这将导致给像素分配错误的颜色。这可以通过移除不在房间表面上的点来避免,但这将不可避免地导致无色的间隙。为了吸引人的视觉效果,内画技术可能有助于填补这些空白。 Removal of points not lying on the surfaces will be the subject of future research.

结果
在颜色信息与真实表面相对应的区域,表面的颜色质量较好(图4和图5)。有颜色的表面可以输入进行物体检测。图6显示了一个使用计算机视觉分类方法自动检测套接字的示例。当家具或物体出现在贴片和扫描仪之间时,错误的颜色可能被分配给贴片。将被组合在一起的三角形的平均距离需要被精确地指定;该参数主要由壁厚和扫描仪的分辨率决定。一般来说,质量足够好,可以执行对象检测。
结束语
该方法可用于丰富建筑信息模型(BIM)的语义信息。此外,RGB图像提供墙壁装饰的细节,如海报、图像、标志和其他非几何信息,这可能对某些应用程序有用。此外,色彩信息还可以用于生成更小的3D模型,适合于交互式可视化,同时保留图像中的细节。例如,初始点云需要1.77GB的存储空间,未压缩图像需要223MB,而彩色线框的web导出只需要一个8.08MB的HTML文件。源代码可在https://github.com/DURAARK/orthogen.
确认
感谢佩-克里斯蒂安·汉森进行扫描和注册,感谢保罗·皮尔斯允许使用这些数据。
进一步的阅读
Krispel, U., Evers, H. L., Tamke, M., Viehauser, R., Fellner, D. W.(2015)从注册全景视图自动纹理和正射影像生成。ISPRS——Int。拱门。Photogramm。遥感学报。, XL-5 / W4, 131 - 137,https://doi.org/10.5194/isprsarchives-XL-5-W4-131-20157 p。
建筑信息管理中的数据完成:距离扫描和照片中的电气线路。:可视化的工程.5, 1,https://doi.org/10.1186/s40327-017-0042-511 p。
Ochmann, S., Vock, R., Wessel, R., Klein, R.(2015)从室内点云自动重建参数化建筑模型。计算机与图形学中国,54,94-103,doi:10.1016/j.c cag.2015.07.008, CAD/图形学专刊,9p。























