3D重建的救世主基督
无人机在极具挑战性的条件下重建标志性的雕像
本文最初发表于测绘学的世界.
里约热内卢著名的救世主基督雕像使用无人机进行了3D重建。恶劣的天气条件和巨大的纪念碑意味着需要仔细的规划来完成项目和维护安全。在雕像周围拍摄了数千张照片,并进行处理,以创建一个大而精确的点云和纹理网格。
(作者:Lisa Chen和Sonja Betschart, Pix4D,和April Blaylock, Aeryon Labs)
在去年的国际足联世界杯期间,世界各地都看到了巴西里约热内卢的救世主基督雕像的迷人图像。这座著名的雕像不仅是这座城市的标志,也是一个工程奇迹。这座纪念碑的总高度为38米,臂展为28米(图1)。它由钢筋混凝土建造,表面覆盖着三角形肥皂石瓷砖,从700米高的Corcovado山山顶俯瞰整个城市。这座雕像由法国雕塑家保罗·土斯基设计,由巴西工程师海特·达·席尔瓦·科斯塔在1922年至1931年间建造。由于雕像的尺寸、位置和恶劣的天气条件阻碍了现有技术(如激光雷达)的使用,到目前为止,还没有精确的3D模型。然而,在2014年10月,在名为“project rejeto reentor”的项目中,一架无人机成功捕获了这座雕像。
天气
该无人机将在恶劣的天气条件下部署在Corcovado山顶。10月的平均风速为30公里/小时,这是一个较高的风速,但仍低于无人机可以维持的50公里/小时的风速。然而,当风到达峰值时,在面向风的一侧会产生更高的压力,而在阴影一侧则会产生更低的压力。这反过来又能在正面产生一个向上的高速气流和在阴影面产生下拉效应的混乱气流模式。只有自动驾驶仪才能处理这种情况。在手动遥控的情况下,飞行员的反应时间会过于缓慢,无法对风速的变化做出反应。可见性是另一个需要考虑的问题;为了保护雕像游客的安全,只允许在正常开放时间以外飞行,但这段时间通常会出现大雾,能见度可能会降低到5米。
安全
起飞和降落被限制在雕像脚下一平方米的区域内(图2),因为其他区域被电缆等物品阻碍。雕像下方的支撑结构中含有大量的铁,造成了电磁干扰,干扰了无人机中的电子罗盘。这个问题可以通过在起飞前强制系统设定一个已知的初始方向来解决。另一个需要考虑的问题是,车辆应该如何处理与控制平板之间可能出现的通信中断。这种无人机有几个内置故障保险装置,可以应对这种情况:“Home and land”、“land in place”和“Home and hover”。然而,当雕像位于基地位置和飞行中的艾伦侦查器之间,或者当飞行器在山上盘旋时,所有的选择都有风险。如果降落在露台的外围,就会从山坡上滚下来,无法挽回。为了将这些风险降到最低,自动指令“着陆”被设置在50米的高度,以避开雕像的顶端。此外,低电池裕度增加到300秒,这是上升和下降50米高度所需时间的两倍。
数据采集
“艾伦侦察兵”四旋翼无人机被用作一个平台。它配备了一个集成的相机有效载荷,可以获得1600万张图像。平板电脑上的软件支持基本的相机控制,比如快照、变焦级别和录像。每次单独飞行持续10分钟,之后必须更换电池,并从无人机下载数据。只有在天气条件允许的情况下,航班才会在上午游客开放时间之前进行。在6天的时间里,总共进行了19次飞行,获得了3584张图像。最终共有2090张图像被用于重建。
子项目
整个图像集被细分为9个子项目:头、左手、右手、身体、下基、中基、上基、崖、台。这允许并行处理所有数据,并将项目规模保持在软件和硬件施加的上限之下。
靠近雕像的GNSS信号受多径影响。由于这个原因,项目处理时没有地理标记;全球导航卫星系统的信息太不准确,无法为重建工作带来任何好处,也会误导相机的校准。使用Pix4Dmapper Pro软件对图像进行处理,并使用该软件对相机进行标定,重建每个相机的位置和姿态。然后,将定向图像处理成点云和纹理网格。在每个子项目中,Pix4D的自动重建被手工放置的联络点增强。例如,在雕像手上的避雷针上放置手动系点,以连接捕捉到的图像(图3)。手动系点也用于尖锐阴影干扰自动化过程的位置。在所有子项目中总共使用了150个手动联络点。
最终的重建
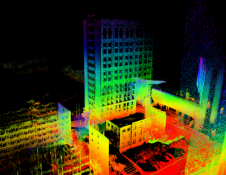
所有的项目被同时合并,总共有82个共同的手工点击的联络点。然后,该软件应用稠密匹配算法,通过在成对的图像中寻找尽可能多的对应像素来创建稠密点云。在这一步之后,Pix4Dmapper的工具被用来裁剪不需要的部分,并从背景中过滤点。此时,整个重建模型相对精度较高,但没有携带任何比例和位置。一个长度测量是在雕像的底座上进行的,以设置模型的比例。设定好比例后,就可以从模型上测量出雕像的尺寸。表1显示了测量的距离和1924年设计图纸中报告的距离。最后的点云由1.344亿个点(图4)和250万个三角形的三维纹理网格(图5)组成。重建模型的细节量取决于无人机与雕像的距离。
| 位置 | 以模型(m)计量 | 设计报告(m) | |||||
| 雕像的高度 | 30.00 | 30.03 | |||||
| 高度的基础 | 8.09 | 8.00 | |||||
| 臂展 | 29.42 | 29.40 | |||||
| 表1,模型中测量的长度与1924年设计图纸的比较。 | |||||||
结束语
该项目表明,无人机技术可以对难以接近的结构进行精确建模。有挑战性的天气条件和安全限制并不一定是一个成功的项目的障碍,只要仔细规划到位。要实现大型结构的改造,需要分解成几个子项目。
图1,雕像和底座的布局,非常接近的测量。
图2,在基地上的无人机准备起飞。
图3避雷针上系点重建手点云
图4重建后1.344亿点的全点云。
图5,救世主基督的3D纹理网格。
作者
丽莎陈
Lisa Chen有大地测量学背景,在台湾和美国都有GIS和摄影测量的经验。她是瑞士Pix4D的技术沟通经理。在“project rejeto Redentor”中,Lisa负责处理图像并使用Pix4Dmapper创建3D模型。
索尼娅Betschart
Sonja Betschart拥有营销和项目管理的背景,并一直负责Pix4D的营销和沟通直到2015年4月。她建立并管理了“rejeto Redentor”项目,包括在巴西与项目合作伙伴PUC University of里约热内卢和Aeryon Labs一起进行数据采集。
4月Blaylock
April Blaylock拥有机械与机电工程应用科学硕士学位,具有自主机器人和计算机视觉的背景。她在加拿大艾伦实验室担任研发高级无人机系统工程师。她为“rejeto reentor”计划并驾驶了所有无人机数据采集飞行。