
基于基于图像的基于图像的DSM生成
高质量机载数据收集的潜力
鉴于摄影测量技术和三维重建软件的迅速发展,欧洲空间数据研究组织(EuroSDR)发起了一项基于图像生成数字地表模型(DSM)的基准项目。这样的比较评估为软件开发人员提供了一个展示他们正在进行的工作潜力的平台。此外,它还可以帮助像负责在全国范围内生成高质量dsm的国家测绘和地籍局这样的用户了解此类工具的适用性,同时根据他们的需求触发进一步的开发。来自10个参与者的对比结果提供了对密集匹配算法的全面洞察,并展示了基于图像的摄影测量数据收集的当前潜力。
为了限制潜在参与者所需的数据处理工作,测试仅限于航空图像飞行的子集。因此,制备了由两个具有不同陆盖和块几何形状的两个航拍图像子块组成的两个代表性数据集。第一个DataSet,Vaihingen / Enz是在具有不同陆地覆盖的区域的州宽DSM生成期间通常收集的数据代表。它涵盖了起伏地形的半农村地区。地面采样距离和图像重叠都相当温和。为基准测试的子块由三条带组成,每个条带有12个图像,导致每个对象点的四到九个图像(图1)。DSM必须为块中心产生7.5km x 3km的块中心。其预定义的网格宽度为0.2m,对应于所用空中图像的地面采样距离(GSD)。第二个测试数据集更为典型的应用程序在密集地建立的城市区域,其中图像通常以更高的重叠和分辨率捕获。慕尼黑的数据集覆盖了该市的中央部分,并在10厘米的GSD中捕获,航班中80%,80%的十字架飞行重叠。 This results in up to 15 folded object points and thus a considerable redundancy. The image sub-block to be processed consists of three image strips each with five images. The area to be processed measures 1.5km x 1.7km (Figure 2).

易于使用的测试程序
为了使更多的参与者从不同的背景中实现,测试被设计为简单实现,同时为生成可比数据集提供基础。所有参与者必须使用无需修改的图像块可用的方向参数。没有考虑3D点云,评估仅限于预定义大小和分辨率的DSM光栅。该项目于二零一三年二月发起,并在2013年5月举行的参与者提交结果。作为第一次审查,然后在2期间呈现和讨论这些审查ndEuroSDR workshop on 'High Density Image Matching for DSM Computation' which was held at the Federal Office of Surveying and Metrology in Vienna, Austria, in June 2013. Software systems presented at the workshop were SocetSet 5.6 (NGATE) from BAE Systems, Microsoft’s UltraMap V3.1, Match-T DSM 5.5 from Trimble/inpho, ImageStation ISAE-Ext from GeoSystems, Pixel Factory from Astrium, the DSM Tool from the Royal Military Academy (RMA) of Brussels, the remote sensing software package from Joanneum Research, MicMac developed at IGN, SURE from the Institute for Photogrammetry (IfP), University of Stuttgart and the FPGA implementation of the SGM algorithm from the German Aerospace Center (DLR).

DSM质量评价
由于从独立测量中检索高质量的参考面是困难的,因此参与者的结果被用来生成一个中值DSM来进行评估。虽然这一中间值不能被视为独立的基本事实,但仍然可以捕捉到各自解决方案之间的差异。
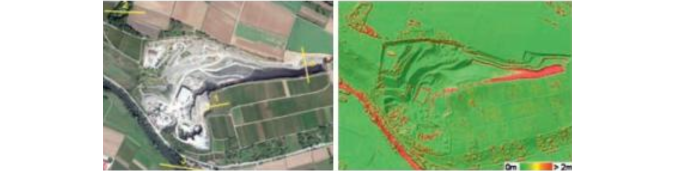
图3显示了一个子集的正交图像和Vaihingen/Enz测试区域部分中值DSM的阴影浮雕表示。另外,还覆盖了所有dsm的均方根差异(RMS)的颜色编码表示。从图3(右)中相应的正射影像中也可以看到,在采石场的阴影区域、河流区域、树木斑块附近和葡萄园区域都出现了较大的差异。
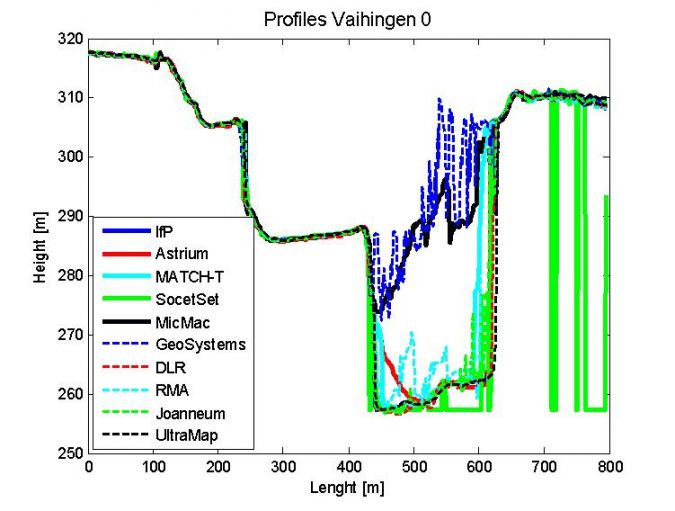
图4显示了多个单一解决方案的不同DSM。这些-2m和+2m之间的差异用不同的颜色编码,与图3中的均方根差异不同。为了定量分析,我们还提取了海拔剖面。这些线覆盖在图3(左)中的正交图像上。线0的高程剖面图如图5所示。虽然在采石场光照充足的区域,所有海拔高度都非常相似,但在受阴影影响的区域,一些解决方案存在较大差异。对于不存在图像匹配问题的物体表面,几乎所有解之间的差异都在20cm左右,即在本例中等于GSD。
同样,慕尼黑测试区的结果如图6所示。不同解决方案之间的差异主要体现在小细节和建筑附近的陡峭边缘上。此外,阴影似乎会导致更大的差异和增加噪声的重建表面。
示例剖面0的标高也覆盖在图6的正位像上,如图7所示。剖面的第一部分在地面上,地面被投射的阴影覆盖。特别是在这个领域,一些解决方案显得相对嘈杂,而另一种解决方案在façade定义的步长边缘出现了相对较大的差异。图7(右)给出了两个天窗侧面的近距离视图。可见,所有的解决方案都正确地遵循了这些结构的形状,但差异在10cm左右,这也等于该数据集的GSD。

运行时
除了几何DSM质量之外,软件解决方案的质量还取决于计算效率和所需的处理时间。这不仅受到实现算法的影响,而且还应该是由所使用的硬件环境产生的结果。由于读取和写作操作量相当大,数据摄取,这取决于可用的存储系统和网络环境,是另一个影响因素。因此,要求参与者提供有关其硬件环境的信息,处理基准数据的处理策略和时间精力。硬件环境从标准台式PC具有单个,多核或多个高端显卡的标准台式机,以应用较大的计算机集群。因此,记录的处理时间不允许进行清晰排名,而是展示用于区域覆盖DSM集合的图像匹配算法的一般容量。一般而言,即使使用标准硬件环境,即使使用标准的硬件环境也达到了许多软件系统的可接受运行时。因此,在大约4小时内可以实现具有220mp /图像的15个图像的慕尼黑数据集和具有36个图像和136mp /图像的Vaihingen / Enz的处理。
结论
尽管从航拍图像自动生成高程数据的立体匹配技术早在20多年前就已被引入,但直到最近才取得相当大的进展。最先进的数字机载相机提供良好的动态图像和信噪比。此外,像半全局匹配(SGM)这样的方法允许有效地实现额外的约束,例如光滑表面的偏好。这些开发使得逐像素高程估计成为可能,即使是在低纹理区域这样的困难场景中。
EuroSDR基准项目表明,有越来越多的软件工具可用来生成详细和可靠的基于图像的DSM。处理不仅受益于改进的算法,而且还利用大的图像重叠,以有效地消除错误匹配。这为DSM在垂直精度接近亚像素水平时提供了相当大的可靠性。然而,在基于图像的表面重建过程中,仍然存在一些问题。一些解决方案显示,当投射阴影时,准确性下降。在接近可用图像分辨率的精细物体结构中,各自结果之间的差异也有所增加。


进一步的阅读
EuroSDR (2013):http://www.ifp.uni-stuttgart.de/eurosdr/ImageMatching/EuroSDR'基准的网页在图像匹配的项目上的基准。
Fritsch, D., Pfeifer, N. & Franzen, M.(编辑)(2013):2nd高密度图像匹配的Eurosdr车间DSM计算匹配。EUROSDR出版系列,第63号。另见http://geo.tuwien.ac.at/news/2nd-workshop-on-high-density-image-matching-for-dsm-computation-successfully-completed-2013-06-19/
Haala, N.(2013):密集图像匹配算法的景观,2013年摄影测量周,威奇曼·弗拉格,271-284页。
目前图像匹配的软件开发正在以相当的节奏推进。因此,主要目的不是对系统进行排名,而是为了展示其区域覆盖质量数据收集的能力。此外,可以预期连续改进,用于匹配精度和计算性能。因此,基准项目将继续进行未来的更新。























