点云软件的背景
要有用,需要存储,组织,组合,地理学,测量和分析,并分析由各种主动和无源传感器产生的数百万或甚至数十亿个3D点,并且这些任务都需要软件。数十亿3D点的存储是本身的问题在M. Kodde(16页)。最初为机载激光雷达开发的LAS存储格式已成为事实上的标准。更通用的基于XML的E57格式支持元数据、2D图像和大量的点属性。然而,专有格式通常是首选,因为它们针对特定于系统的输出进行了优化。
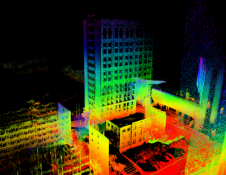
点云是在优选坐标系中表示的一组数据点。最初,数据是未组织的;软件旨在组织未经组织并从中提取信息。处理软件可以是通用的,并且从传感器的多样性处理点云,或者可以专用于特定的输出,例如由地面激光扫描仪(TLS),机载LIDAR,移动映射系统(MMS)或声纳获取的数据。点云生成传感器的制造商已经认识到客户端需要处理其传感器的输出,并将其硬件与专有软件相结合,用于管理,地理转移,可视化,编辑和导出输出到专用软件。一些软件构建器在提供了从特定传感器类型(例如LIDAR)的特定传感器类型(如LiDAR)和像素数据组合,从单独的像素数据或声纳提供诸如激光器数据的宽托盘的潜在工具。其他包从光谱的另一端源,即应用领域。例如,用于某个CAD系统的构造函数开始欣赏TLS点云并要求供应商添加用于处理它们的模块。一些制造商沿途发现了新的机遇,并在一个或多个基础模块的顶部建立了专用模块,例如,矿业行业或崩溃站点的3D模型。此开发过程远非完整,并且正在添加新工具。 However, a generic package which can handle all types of sensor output and generate all types of end product does not exist, because each package has its own peculiarities. Therefore, before purchasing software, it is not only important to look at the functionalities of the software, but also advisable to examine its design ideas, any current or planned extensions, its ability to join modules into one workflow, and interoperability with other software and services provided. On26页我提供了一份关于旨在创建dem或dsm及其衍生产品的软件的调查报告。这是本系列的第一部分(发表于6月号)的后续内容,该部分主要讨论功能。