倾斜影像的自动处理
连接图处理倾斜的视图
斜向多摄像机系统正在迅速成熟,并扩大了机载技术和服务的市场。由于倾斜图像的数据集很大,因此需要对其进行自动处理。在此,作者提出了一个使用连通图自动定位大斜角块的工作流程,并讨论了斜角图像的自动密集匹配。
斜向机载多摄像机系统正日益成为传统垂直视图的补充。以前隐藏的façades和建筑脚印在倾斜视图中被揭示,这使得倾斜图像在三维城市建模和地籍目的以及紧急快速响应和场景解释方面很有用。过去的研究重点是人工操作人员对倾斜图像的可视化和检测。然而,今天的兴趣集中在度量功能上。
倾斜和垂直
倾斜视图比垂直视图内容更丰富,但会带来更多的遮挡和图像特征相似性的退化,以及显著的尺度和光照差异。倾斜的图像也更容易出现热点和太阳闪烁,这些现象出现在朝向太阳或远离太阳的时候。此外,飞行轨迹中的不稳定性更有害。因此,大规模项目的高效执行需要可靠的解决方案、自动提取联络点和密集匹配进行三维重建。
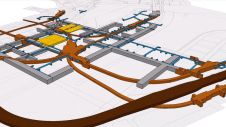
系点
航拍图像的内部和外部参数通常是事先已知的。内部参数通过实验室标定获得,外部参数通过车载传感器(GNSS/IMU)直接测量。然而,这些参数只是公制和自动应用程序的近似值;因此,必须进行最小二乘意义上的调整。在不使用地面控制点的情况下,对倾斜影像进行直接地理参考仍然是一个需要解决的问题。在处理地面图像时所获得的经验,为我们提供了足够的见解,以便采用和调整地面方法处理空中的倾斜图像。地面图像与倾斜航空图像一样,具有收敛性和无序性。主要的障碍是在重叠图像之间有效地生成假定的对应。首先利用GNSS/IMU信息和连通图识别出具有最大相似性的成对、三联或更大的图像集,然后进行匹配。连通图表达了图像之间的空间关系,加快了图像对应关系的确定,减少了离群值的数量。图像之间的连通性用图的形式来描述,图的节点表示图像,边表示图像之间的关系,即两幅图像在空间上相容时用一条边连接。 An image pair has to fulfil three conditions in order to be connected: (1) their footprints coincide by a given percent, (2) cameras’ look directions are similar or one of the cameras is nadir, and (3) the number of extracted homologous points exceeds a threshold.