Automated Extraction of Road Information from UAV-based Data
The Benefits of Airborne Technology in Urban Projects
When it comes to monitoring the condition of roads, UAV technology can overcome many of the downsides associated with traditional methods, which can be time-consuming, labour-intensive and sometimes subjective. This article explores the opportunities for automated extraction of UAV-based data information about road construction, inventory and road environments.
Roads are one of the significant urban characteristics. They connect long distances to each other effectively, quickly, comfortably and safely. Therefore, their current conditions need to be monitored to make sure they meet the standards. However, traditional methods to monitor the condition of roads are time-consuming, labour-intensive and sometimes subjective. A relatively new way to monitor road condition is unmanned aerial vehicle (UAV or ‘drone’) technology. UAVs are one of the fastest-growing technologies in several fields such as precision farming and agriculture, forest, ecological and structural health monitoring, and geological, topographic and archaeological mapping.
UAV-based data is collected as the UAV flies over the study area and captures multiple images. Two different types of flight plans, namely manual and autopilot flight plans, are available in the UAV remote controller. Both plans have their own advantages. The autopilot flight plan is straightforward to collect data. The flight plan is remotely set in the interface and the UAV flies and acquires data automatically. However, the flight plan needs to be adjusted according to the characteristics of the UAV platform, which are maximum flight time, flight speed, height above ground level and horizontal distance.
Acquiring, Processing and Viewing UAV Data
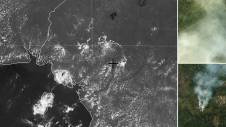
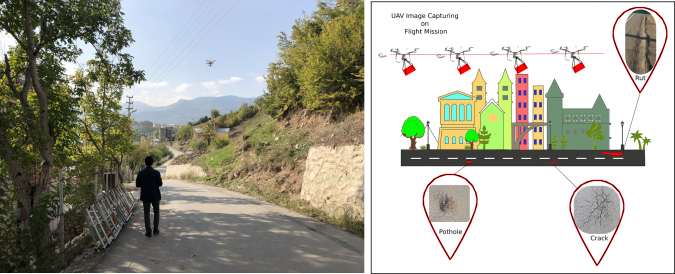
自动驾驶仪飞行计划可能不是合适的to the harsh terrain or conditions of the study area, such as having steep slopes or having overhead powerline cables and poles, structures or trees. In these cases, manual flight may be better for safety reasons. In addition, two different kinds of images – nadir and oblique images – can be captured using UAV technology (see Figure 1). Oblique images increase the three-dimensional (3D) model quality, especially on vertical structures. The camera on the UAV is another important component to collect high-quality data, and camera specifications directly affect the quality of the captured images. The resulting two-dimensional (2D) images can be used to monitor road conditions. However, they may not support accurate surveying since single images provide no depth information.
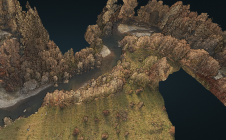
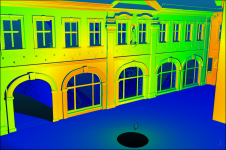
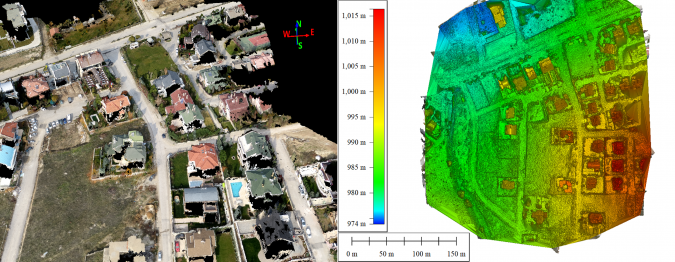
3D models can also be produced from 2D images. Most UAVs usually contain global navigation satellite system (GNSS) and inertial measurement unit (IMU) sensors, which provide camera locations with centimetre-level accuracy. Therefore, the 3D model can be produced using structure from motion (SfM) techniques. The SfM technique finds tie points in each image that can be matched on consecutive images. In addition, camera locations and orientations are also estimated using photogrammetric equations. Lastly, 3D point clouds of the object of interest can be reconstructed. There are several user-friendly commercial software options (Pix4D Mapper,Agisoft Metashape,3Dsurvey,UASMaster,Photomodeler, etc.) and open-source software (VisualSFM,MicMac,COLMAP, etc.) to convert 2D images into 3D point clouds using SfM techniques. In addition, orthomosaics, digital surface models (DSMs) and digital terrain models (DTMs) can be produced using such software. These outputs can be viewed using various software such asQuick Terrain ModellerandGlobal Mapper(see Figure 2).
Extracting Road Information from UAV Data
Road information such as road surface, centre line and lane markings, profile, cross-sections and distresses can be extracted from 3D point clouds. These insights into road condition are significant for improving road performance, comfort and safety. In order to collect road information, the road surface first needs to be distinguished from other urban or rural objects and classified. Machine learning algorithms such as Random Forest can be used to classify road surfaces, and these algorithms produce classification results both quickly and with high accuracy. Once the road surface has been classified, other geometric information can be easily extracted.
Road centre line and lane markings are commonly used for road modelling, planning and safety. In addition, this information will be increasingly important for navigation purposes, especially in the context of autonomous driving in the near future. If the road lanes are marked using a specific colour (mostly white or yellow), they can be directly extracted using the RGB feature. RGB values express the colour of the 3D model, and they are transferred from the image processing software using images. In some cases, especially on local roads, road lanes may not be marked in a specific colour or the road lane markings may be damaged and not continuous. In such cases, several methods – such as the improved Voronoi diagram-based algorithms – can be introduced to extract the road centre line and lane markings more robustly and accurately.
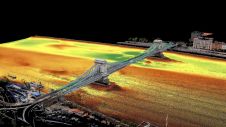
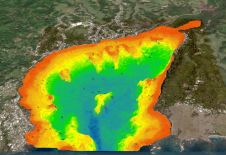
‘Road profile’ refers to the vertical section taken along the alignment axis (centre line) of the road. It is important to analyse the incline of the road since this can be a source of danger in the case of icing. Road profiles can be extracted through the DSM. DSM data can be produced from 3D point clouds using various interpolation algorithms. One of the most commonly used interpolation algorithms is the inverse distance weighted (IDW). The height values are recorded as a raster format in the DSM. Then, the Z dimension of the road centre line is extracted from DSM to obtain the profile of the road easily and accurately (see Figure 3).
The road cross-sections provide the creation of a road platform with certain slopes perpendicular to the road centre line. The cross-sections are also important for the transfer of water from the road surface to the roadside and the design of the drainage channels alongside the road. Similarly, the Z dimension of the lines perpendicular to the road centre line is extracted from DSM to obtain the cross-sections of the road easily and accurately (see Figure 3).
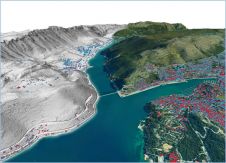
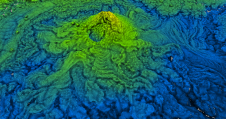
Lastly, road distress can also be detected from 3D point clouds. Accurate detection of road distress is an important input for maintenance and repair actions. Timely maintenance and repairs need to be performed to increase the road’s service life, and to maximize comfort and road safety for drivers. In addition, on-time maintenance and repairs may reduce long-term costs. Various methods and techniques are capable of automatically detecting road distress (see Figure 4).

Conclusion
Besides being used in other disciplines, UAVs have great importance in surveying and producing all kinds of up-to-date road information. In particular, the use of UAVs in road projects has increased in recent years since they can play an important role in the control of road inventory and safety, repeated land surveys and analysis of sustainable road networks, and mapping and projecting activities. Automated information extraction is very effective with small-package software as well as traditional GIS software. As a result, it is possible to extract information about road construction, inventory and road environment from UAV-based data. It is inevitable that, in the near future, the use of UAV systems will secure its place as an indispensable measurement method in road construction and the production of other road information.
Further reading
Serkan Biçici and Mustafa Zeybek. An approach for the automated extraction of road surface distress from a UAV-derived point cloud.Automation in Construction, 122:103475, 2021.
Serkan Biçici and Mustafa Zeybek. Effectiveness of training sample and features for random forest on road extraction from unmanned aerial vehicle- based point cloud.Transportation ResearchRecord, 2675(12):401–418, 2021.
Mustafa Zeybek and Serkan Biçici. Geometric feature extraction of road from UAV-based point cloud data.The Proceedings of the Third International Conference on Smart City Applications, pages 435–449. Springer, 2020.
Mustafa Zeybek and Serkan Biçici. Road distress measurements using UAV.Turkish Journal of Remote Sensing and GIS, 1(1):13–23, 2020.
Mustafa Zeybek and Serkan Biçici. 3D dense reconstruction of road surface from UAV images and comparison of SfM-based software performance.Turkish Journal of Remote Sensing and GIS, 2(2):96–105, 2021.

Make your inbox more interesting.Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
Sign up for free