先进的城市三维建模和可视化
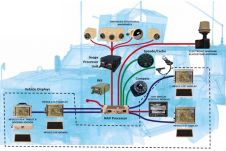
自动建筑物检测和三维建模的通用工作流
利用遥感数据对城市建筑进行自动检测、数据提取、三维建模和可视化是地籍地籍、城乡规划、变化检测、测绘、更新地理信息系统、监测、房屋价值和导航等应用的基本任务。即使在今天,由于所使用的遥感数据中固有的人工因素(如阴影),以及不同的视点、周围环境和建筑物复杂的形状和大小,这项任务仍然具有挑战性。本文概述了使用现代技术的通用工作流。
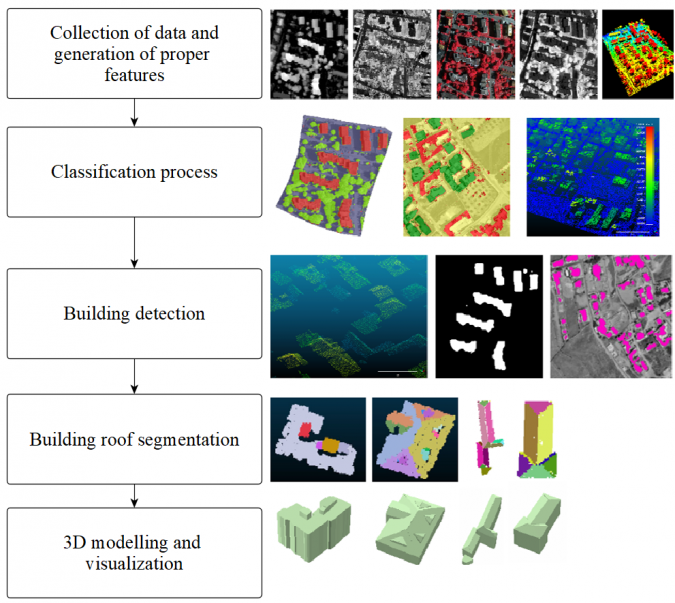
除了最近的图像处理的发展之外,计算机视觉的进步还促进了能够从来自空中平台的重叠的多个2D图像数据生成精确的3D模型的自动化方法。这些方法应用致密图像匹配(DIM)算法,其提取区域的纹理密集的3D点云或感兴趣的对象。与使用其他类型的感觉数据(如LIDAR)相比,Dim是一种实惠的过程。在该领域,已经开发了许多强大的立体图像匹配算法,每个匹配算法具有其自身的优点和局限性。用于构建检测和3D建模的通用工作流程包括以下步骤:i)数据集合和产生适当的功能,ii)分类过程,III)建筑物检测,IV)构建屋顶分割,V)3D建模和可视化。
附加功能的生成
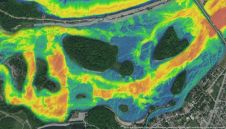
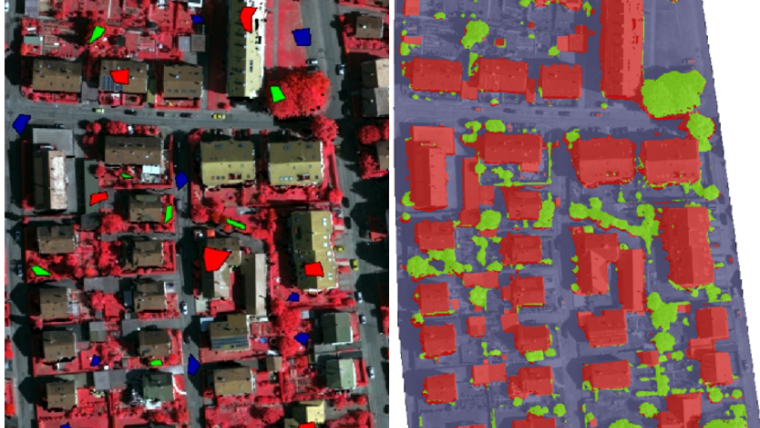
根据所采用的数据源,建筑物探测技术可分为三类:(i)使用机载或卫星图像数据的技术,(ii)利用三维信息的技术,以及(iii)结合两种数据源的技术。但是,使用来自多模态来源(例如激光雷达和图像数据)的信息的两个主要限制是获取和处理的额外费用以及与共同登记有关的问题。由于这个原因,在现实生活中的应用,如地籍,有时只考虑一种类型的数据。为此,通过计算若干指标和特征,有效地将建筑与其他城市对象(如植被和地面)区分开来。在这种情况下,根据所使用的数据,计算归一化差分植被指数(NDVI)(当图像中有近红外波段时),计算归一化数字表面模型(nDSM)(当有DIM或Lidar点云时)。然而,额外的特征可以计算和图像堆叠,特别是从激光雷达点云,以进一步促进分类性能。这些特征来自对信息的物理解释,例如熵、高度变化、平面度和法向量的分布。

分类与建筑物检测
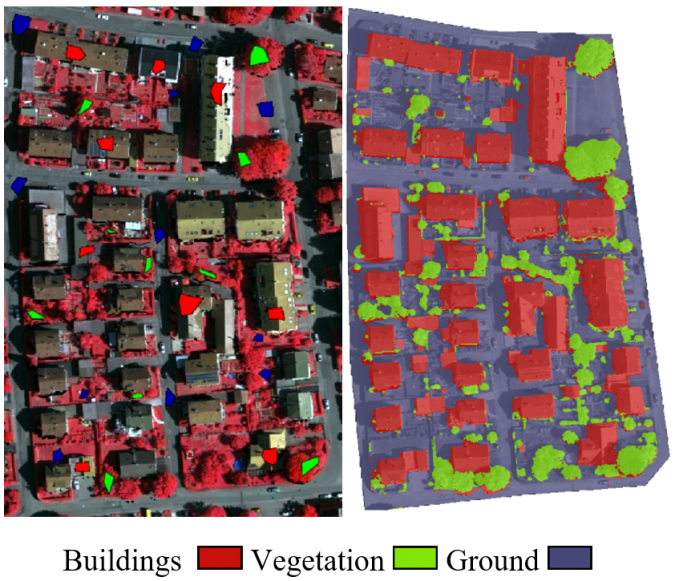
通常,建筑检测的方法被区分为使用监督机器学习方案的方法和使用基于模型的方法。机器学习方法的主要优点是它们是灵活的和数据驱动的方法,只需要训练样本就可以成功地概括建筑属性,从而进行准确的分类。相比之下,基于模型的方法包含许多参数,需要针对每个研究领域进行微调。因此,监督学习范例提供了更高的泛化能力,即对训练集之外的数据的鲁棒性。最近,在机器学习的背景下,先进的算法,如深度学习分类器通过卷积神经网络(CNNs)已被有效地应用于建筑检测任务。
一般来说,CNN分类器有两个主要组成部分:卷积层和分类层。卷积层本质上是一个网络特征提取器,它对输入数据使用卷积过滤器(即转换)(图像堆栈特征)。这些提取的网络特征能够优化分类性能。空间相干性是卷积层中涉及的转换的一个重要元素。这是深度CNN模型的一个重要特性,因为空间特征显著影响建筑检测精度。分类层的目的实际上是一个有监督的学习方案,它能够将卷积层的输入转换为期望的输出,即带标签的类。因此,CNN分类器与浅层机器学习方法不同,它首先对输入数据进行过滤,使分类精度最大化,然后再进行分类。CNN的输出是一个像素级的分类图像,包括与每个类别的标签相关的信息。考虑到分类的空间相干性,采用后形态处理来降低分类噪声,即采用最小算子和多数投票滤波器等。最后,为了评估最终的建筑检测结果,使用了基于TP、FP和FN实体的完整性、正确性和质检率等客观标准,其中TP代表真实阳性(例如正确检测到的参考建筑像素), FP stands for false positives (e.g. building pixels that not exist in the reference dataset) and FN stands for false negatives (e.g. reference building pixels that were not detected).
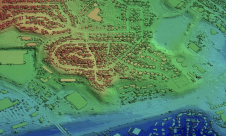
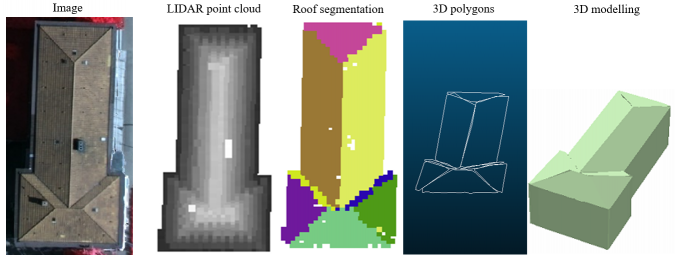
建筑屋顶分割和3D建模结果
来自分类过程的提取的建筑边界略微扩张,以剪辑原始的激光乐队或昏暗点云。然后,对于每个建筑物的每个3D点云,执行建筑物屋顶分割过程。来自3D点云的最常用的平面检测技术是区域生长,RANSAC和HOUGH方法。事实上,自适应点随机化霍夫变换(RHT)可以提取令人满意的结果,极大地满足准确性与计算时间折衷。对于每个检测到的平面,提取相应的边界以生成相关联的3D多边形。一旦每个多边形顶点的归一化高度值可用,就可以提取相应的3D构建模型。
结论
自动建筑检测和三维建模是一项持续的、必要的和关键的任务,适用于各种应用。现代技术支持通用工作流的开发。两个关键的新兴技术是:i)各种可以提供多种信息的新型传感器(例如多/高光谱激光雷达点云),和ii)前沿方法,如深度机器学习方案。
进一步的阅读
- Maltezos,E.,Doulamis,A.,Doulamis,N.,Ioannidis,C.,2019年。建立LIDAR数据的提取应用深度卷积神经网络。IEEE地球科学与遥感快报(GRSL),第16卷,第155-159页。
- Maltezos,E.,Doulamis,N.,Doulamis,A.,Ioannidis,C.,2017年。深度卷积神经网络,用于从OrthoImages提取和致密图像匹配点云。应用遥感学报,卷。11,4,pp。042620-1-042620-22。