
惯性导航系统(INS)是测量师军械库的关键部分。由INS提供的测量,包括标题,俯仰/滚动,时序和绝对位置,确保测量师能够自信地衡量其环境,以确保每个区域和角度都被精确地覆盖。
精确应用的强大调查载体将提供至少0.1°,2cm或更小的位置精度和俯仰/卷精度约为0.05°的标题精度。它还应该提供额外的功能,例如LIDAR集成,以帮助简化验船师的工作,并让他们做更多的是他们擅长的东西......测量。

有一个几乎无限的调查和映射应用程序列表,其中INS是一个更有用的工具。例如,建筑信息建模(BIM),林业调查,沿海监测和基础设施勘探应用程序都可以从INS提供的测量中受益。特别是一个申请,将从上述测量中获利是一种道路调查。
道路调查
在谈论道路调查时,重要的是区分道路施工调查和现有道路的调查,因为这些项目每个都具有独特的要求。
被计划的新道路非常罕见,将能够从其起源到目的地直接或“直接”。必须首先进行调查以分析路线并确定需要考虑的任何潜在特征。这些可以包括诸如丘陵和河流等自然特征,其中可能需要隧道或桥梁,以便诸如建筑物和其他需要导航的其他基础设施的人造特征。一旦确定了一条路线,土地将再次被调查以确定工程师需要在建设期间注意的任何斜坡或环境特征。
在这种情况下,当INS与诸如LIDAR传感器的测量设备耦合时,该系统将为项目团队提供宝贵的信息。与惯性测量相结合的绝对位置将授予所选路线已完全调查的保证,并且已识别出所有潜在的危险,并且可以在下一阶段考虑下一阶段。当通过LIDAR传感器收集的数据配对通过INS获得的位置和惯性测量时,验船师可以创建其环境的高度精确的3D点云,这些环境可以使用时间和再次分析路线。
将此过程正确首次,因为错过的任何东西都可以导致延迟和额外的未占该项目成本来实现这一过程至关重要。由INS提供的绝对,厘米级全球位置准确度使验船师的信心映射了确切的路线并且没有位置漂移。
在现有道路基础设施的情况下,调查仍可能是一个长期的基线调查。然而,而不是评估一条路线的适用性,这将旨在了解更多关于道路目前的国家,随着时间的推移和潜在的危害,如过高的叶子,新形成的坑洼和/或人工障碍物。

过去,这种道路调查特别困难,有三个主要因素需要考虑:道路测量师安全,道路用户安全和保持中断最小 - 所有这些都在所需的时间范围内收集最佳数据。这在小路网络上并不是一个问题。然而,当调查转向亵渎的道路和高速公路时,越来越难以确保安全性甚至没有中断。
调查技术的创新,如INS和LIDAR集成,使调查能够从路边移动到路边或在驾驶时进行,从而降低与道路测量相关的风险。
再次向验船师能够充分接受调查整个道路和每一条危险所占据的。它还提供创建地理位置点云所需的数据。与LIDAR传感器的额外集成还将提供测量师,该测量师能够使用现有道路的点云进行连续和可重复的分析。
此外,与LIDAR数据耦合的INS数据将允许测量师可以使用精度诊断了解可能需要重新保证的区域。
要及时了解最新的移动映射新闻,请按照OXTS Mobile Mapping LinkedIn页面进行操作:OXTS移动映射
基于UAV的映射
在长期基线调查的情况下,例如道路的调查,许多测量师通常将平铺使用诸如汽车的移动式映射车辆。然而,由于无人机技术的进步,无人驾驶航空公司(无人机或“无人机”)开始改变测量师看这种调查的方式。
过去,自从长期基线调查可以长时间漫长的基线调查,无人机并不总是适合这种类型的工作。因为调查(LIDAR)和导航(INS)设备对有效载荷的重量产生负面影响,因此飞行时间往往会大大降低。
快进至今,技术进步是快速流动的。新的UAV电源,如氢燃料电池,使无人机能够延长空气并携带重型有效载荷。同时,诸如INS设备的调查技术越来越小,而仍然能够提供高精度的测量。

要及时了解最新的基于UV的映射新闻,请遵循基于OXT的映射LinkedIn页面:基于UV的映射
惯性导航系统
一个案例是新的OXTS XNAV650 INS.这是由验船师开发的。它的小尺寸(仅77 x 63 x 24mm)与其轻量级(仅130克)相结合,使其成为无人机和基于无人机的调查和映射应用的理想合作伙伴。然而,XNAV650不限于UAV和无人机测量,如下面更详细的说明。
尽管其尺寸小,但XNAV650的性能不符合0.1°标题精度,0.05°沥青/滚动精度和2CM RTK / PPK位置精度。
XNAV650还具有额外的软件集成和功能,帮助测量师关注他们擅长的 - 测量。
LIDAR传感器用于许多调查,以帮助测量师建立他们正在调查的环境的3D图片。这些点云提供了测量师和工程师,具有帮助他们的关键信息,帮助他们做出重要的项目决策 - 例如关于道路/公路路线分析和准备的决策。
但是,在许多情况下,在这篇文章中提高了这些数据,以利用上述益处,在许多情况下需要时间。没有许多测量师甚至想成为软件工程师,所以虽然将ins和lidar数据整合到的意志,但它并不是实际的 - 直到现在!
通过使用LIDAR地理转移软件(例如oxts地理转移师)与OXTS的XNAV650或替代INS一起,用户可以快速轻松地将其LIDAR数据发地地萌发。
兼容LIDAR传感器列表可以在OXTS网站上找到:www.oxts.com.。您还可以了解更多关于我们的工作Velodene Lidar.那hesai.和outer.通过观看技术伙伴页面。
简单的LIDAR集成是OXTS地理福音和XNAV650故事的一部分。激活OXTS地理位置中的Boryight校准功能允许用户利用数据驱动方法来校准导航(INS)和测量设备之间的角度。
这种校准技术可以快速且轻松地设置和执行,帮助测量师加速他们的“调查时间”。您可以了解更多关于我们的信息激光雷达测量和Boryight校准通过从我们的网站下载相关的小册子来解决功能。
“作为工程师,我不知道一个简单的工具,可以精确地测量INS和LIDAR之间的角度到千分之一的程度。oxts已经解决了这个问题,优雅地解决了他们已经存在激光雷达测量的工具。在两个反射目标(廉价建设)之间运行十分钟的数据收集是最困难的部分。鉴于记录良好的OXTS指南,下一步是在OXTS地理源传播器中选择所收集的数据文件并按下“运行Borsight校准”按钮。它真的是那么简单。在指定计算的角度之后,点云精度甚至可以对人眼可见显着改善。“
Andri Karo,Systems Integration Specialist,Skycorp
使用INS进行测量
OXTS合作伙伴Skycorp是一家爱沙尼亚的氢气动力无人机制造商,他成功地使用XNAV650进行道路调查。Skycorp使用:
- 这xnav650的四分之一星座,GNSS定位能力提供厘米级位置精度。这使得Skycorp能够进行长期基线调查的道路。
- 一个euster os1-64 ridar.并使用地理使用数据oxts地理转移师。
- 除了INS和LIDAR旁边,Skycorp利用了Boryight校准工具确保设置已精细校准。这产生了一致和可重复的调查数据。设置仍然通过使用新的设置更简单OXTS精密时间协议(PTP)使用以太网'即插即用'设置的功能。
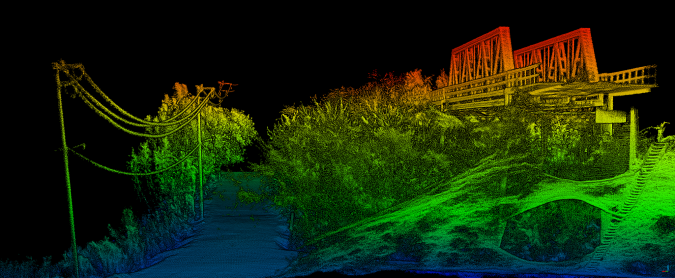
获得的结果如下所示:

结论
通常被视为伴娘而不是测量世界的新娘,在任何长期基线调查中,INS的重要性,不仅仅是一种道路调查。
提供具有高度准确的位置和惯性测量的测量师表示他们需要继续前进到其项目的下一阶段的信心,以证明该路线的每个部分都被覆盖 - 并覆盖得很好。
有关如何使用INS的更多信息,请帮助您简化调查设置并获得最佳结果今天联系OXTS。