
Previously, people had to invest more than 30,000 dollars to purchase professional mapping drones and place a large number of control points on the ground to get accurate, survey-grade maps. This situation continued until DJI released the Phantom 4 series of commercial drones with integrated GNSS antenna and high-definition gimbal cameras. This paper proposes a commercial drone mapping solution using the Phantom PPK to significantly reduce control points, and explains the workflow, testing methods and how the results support this level of drone mapping accuracy.
(本文由Hi-Target带给您,由Richard Pan和Seven Zhao撰写)
Introduction
Phantom 4 RTK(P4R)是一种技术上成熟,具有成本效益的消费级无人机,在市场上很受欢迎。它是灵活的,易于操作,并且支持RTK CM级导航,以及摄像头微秒同步和无用户校准,特别适合用于密集建造的城市和具有复杂地形的区域。
尽管板载有集成的GNSS RTK天线,但它使自动驾驶仪系统能够在访问NTRIP网络差异源后,可以直接将定位坐标和精度因子标记为图像属性(EXIF)(EXIF),PPK(无实时的动力学,无实时的动力学,需要基站和无人机之间的连接。)是一种更可靠的方法,可以避免在城市和没有4G信号覆盖的区域中经常发生的校正中断。此外,校正后的GNSS误差与从基站到无人机的距离成正比(基线),因此与网络基础站相比,PPK基座设置了距无人机几百米的质量位置固定(NTRIP CORS)(NTRIP CORS)()可能几公里。
幻影4 PPK映射解决方案包含的following three main components.
1.无人机平台
It includes the Phantom 4 RTK drone, gimbal camera, remote control, battery and accessories, which is used for the field data collection and raw static observation data logging.

2. PPK地面基础
Hi-Target Inno1便携式RTK用于为PPK处理提供稳定且可靠的基础原始静态观察数据。它也可以用作RTK漫游者来测量现场检查点。
3. PPK后处理软件
PPK Go is a turnkey software that enables Phantom 4 drones to achieve the most accurate and reliable camera positioning data in any coordinate system without measure targets or GCPs. With 2cm accuracies on X, Y, Z dimensions, the output text file with position information or geotagged images can then be used directly in major photogrammetric mapping or 3D modeling software.
准确性验证
我们的团队在典型的城市环境中选择了一个工业园区作为实际测试的场地,以验证最终结果的准确性。特定的测试过程分为以下三个部分,如下所述。

Field Mission
检查点的收购和任务计划
控制点用于提高航空模型的准确性。密度和分布会影响空气三角测量的调整,从而影响最终结果的准确性。对于该测试,如图4所示,该区域内外均匀地放置了八个点。计划将P1,P3,P7作为控制点,其余为检查点。
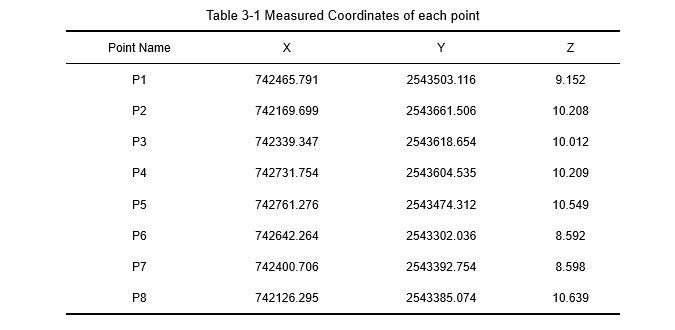
The coordinates of points P1 to P8 were acquired using the inno1 portable RTK when the error of the fixed solution converged to the millimeter-level. Each point was observed independently thirty times, and took the average value as the measurement results. The detailed distribution of the points and their measured coordinates are shown in Figure 3-1 and Table 1, respectively.
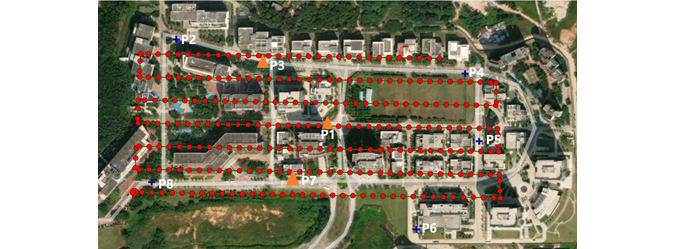
请注意,检查点P2,P4和P6在飞行区域之外。我们想测试非最佳测量情况。
数据采集
Firstly, set up the base station on the known point, measure the instrument height and then start the static recording at 1Hz interval before the flight.
在遥控器上安装的应用程序和根据表2中的参数计划的任务中选择了映射区域。我们同时激活了RTK Geotaging函数(NTRIP),以比较RTK和PPK模式的准确性差异。

The flight mission took about 18 minutes and a total of 267 images were collected, all of which were geotagged RTK fixed coordinates.
PPK处理
运行PPK GO后处理软件,创建新项目并分别导入基站和飞行项目数据。该软件会自动检查数据集的完整性,并匹配文件夹中的图像,原始观察值和时间戳文件。
配置椭圆形和投影并输入基站的已知坐标后,单击“进程”按钮以开始处理。固定解决方案的航向点在接口图上以绿色标记。

Finally, clicked "Export" to geotag the processed high precision coordinates into the imagery and saved it as a new dataset.
Image processing and DOM/DSM generation
目前,有许多可用的无人机图像数据处理软件,例如Pix4Dmapper,MetaShape,Inpho,上下文捕获,Dronedeploy等。软件功能相似。由于其算法的差异,每种都有其优势。该验证项目使用PIX4DMAPPER进行图像处理,该图像处理已被广泛使用并完全自动化的无人机数据和航空图像处理软件。它由三个步骤组成:
Initial processing
创建新项目,导入图像文件,编辑坐标并提供投影系统。每个图像的地理位置信息将自动从EXIF属性字段读取和显示。确认并执行快速初始化后,该软件将自动完成以下步骤。
- 关键点提取:将特定特征确定为图像中的关键点。
- Key points matching: Find which images have the same key points and match them.
- Camera model optimization: Calibrate the internal (focal length...) and external parameters (orientation...) of the camera.
- 地理位置GPS/GCP:如果提供了地理位置信息,请找到模型。
- Automatic Tie Points are created during this step. These are the basis for the next steps of processing.
This step will build on the Automatic Tie Points with Point Densification and 3D Textured Mesh.
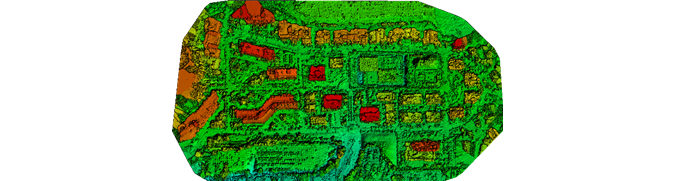
DSM,DOM生成
After the processing has been completed, we clicked the mosaic editor to fine-tune the image and complete the generation of the digital surface model (DSM) and digital orthophoto map (DOM).
The following three sets of data were processed separately, and finally, three sets of DOM/DSM maps were generated:
- 无GCP的地理标记NTRIP RTK数据。
- PPK data, no GCP.
- 地理标记的NTRIP RTK数据,P1,P3,P7充当GCP。

准确性验证
处理数据后,我们查询了地图上每个检查点的坐标,然后将它们与相应的RTK测量坐标进行了比较,以计算方差DX,DY,DZ。结果显示在表3表5中。
dS is the point mean square error that calculated according to dX and dY dimensions. The calculation formula refers to the formula 4-1, in which dS is the checkpoint mean square error, Δi is the coordinate component deviation, n is the number of points for evaluation accuracy, and the units are meters.



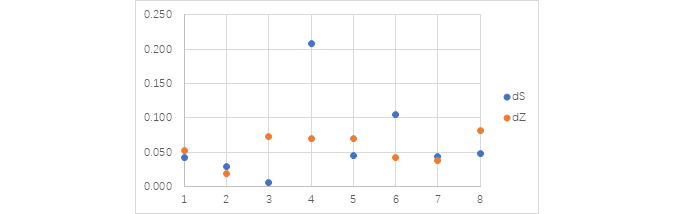

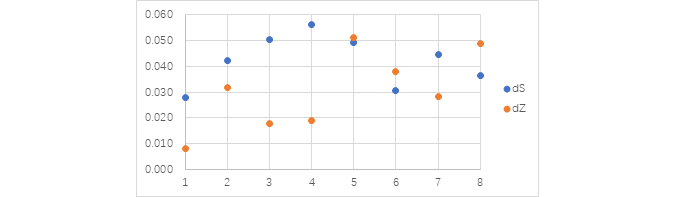
如上图所示,可以分析NTRIP RTK和PPK的水平准确性均在5厘米内没有控制点校正,这是地形调查的理想准确性。在海拔尺寸中,需要用少数控制点校正RTK精度才能达到与PPK相同的水平。相对于水平的控制点校正,高度精度更容易受到控制点的影响。当考虑到可以受到通信质量和工作环境影响的NTRIP RTK时,PPK提供了更可靠和稳定的精度优化,并且较少依赖控制点。
相对于RTK和PPK模式,点P4和P6的精度相对于其余的精度较差。当通过控制点校正时,其准确性将大大提高。对于路线覆盖区域以外的点,其精度在零GCP的条件下相对较差,必须通过适当扩展路线区域或放置少量控制点来优化。
Conclusion
从上述实验分析可以得出结论,幻影PPK解决方案在整个调查中始终将精度降低到5厘米或更高(取决于GSD)。与传统的无人机映射方法相比,它大大降低了对控制点的依赖,减轻了现场工作的工作量,提高了效率和安全性,并为无人机映射提供了可靠,具有成本效益的商业解决方案。
Further reading:
参考
[1] Liu Jianguo. Research on the production method of Surveying and mapping products based on DJI drones [J]. Smart City, 2019(18).
[2] Guo,S.M。基于无人机航空摄影[D]的大规模映射和三维建模研究。2017。
[3] Zhang Wei,Fu Ling,Chen Xiaosong。基于无人机摄影[J]的1:500地形图映射的应用。北京地图,2017年(S1):132-135。
[4] Jiang Lili, Gao Tianghong, Bai Min. Application of drone image processing technology in large scale basic mapping and surveying engineering[J]. Mapping and Spatial Geographic Information, 2013(07):184-186.
[5]中国国家标准化管理委员会的质量监督,检查和隔离的质量监督,检查和隔离。GB/T 7930-2008 1:500 1:1000 1:2000地形空中摄影测量法[S]。北京:中国标准出版社,2008年。
[6] Zhu S.江西建筑材料,2019年(8)。