
点云(1)
无论是基于激光雷达、摄影测量、雷达、声纳还是其他遥感传感器,地理数据采集系统都能生成数百万甚至数十亿个3D点。为了有用,数据需要被组织起来。
技术进步有一个主要目标:让我们更容易地完成任务。每一项新技术都必须表明它已经解决了一个问题,而点云建模也不例外。在很长一段时间里,进行土地调查是一个挑战。测量师、承包商和工程师在这些活动中投入了大量的资源,增加了项目成本和工期。点云建模,一个新的概念,已经改变了这一点,使它更容易调查工作地点。
点云以数据点阵列为特征,每个点由X、Y和Z坐标组成。每个数据点表示一个表面面积,创建一个三维结构,测量人员和工程师可以研究。此外,点云是可操作的,以揭示一个地点的更多细节,例如,它的地形和特征。
因此,点云建模是创建点云的艺术,这是可能的使用激光雷达和摄影测量。
激光雷达不一定是一个系统。相反,这个术语包含了使用远程传感器从站点收集尺寸并将其转换成3D模型的点云建模中使用的工具。从物体到环境,这些工具使用紫外线或近红外光绘制区域。该工具发送光脉冲,并测量脉冲返回地面或从无人机发射到扫描仪所需的时间。基于激光系统的工作机制,脉冲通过增益介质,如那些可用的EksmaOptics.com放大。然后,激光雷达工具通过多次扫描覆盖一个圆,将脉冲时间转换为方向和距离。最后,该工具使用每个读数的X、Y和Z坐标在3D模型中创建点云数据。如果可能,将GPS时间戳添加到模型中。激光雷达适用于各种材料,包括云、岩石、雨,甚至气溶胶。事实证明,对于那些从事物理访问可能不可能的领域工作的人来说,它是一块瑰宝。
虽然这个方法很有效,但它也带来了一些挑战。首先,光束必须有可视通道,这在恶劣天气时可能很棘手。其次,表面反射会干扰数据采集。
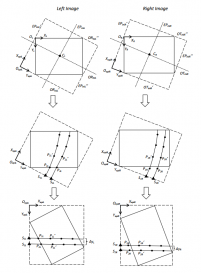
这种方法使用无人机捕捉一个地点的照片,而不是依靠激光来绘制地点。安装在无人机上的摄像机可以做到这一点。考虑到相机依赖于角度,就需要根据每个站点的环境条件调整相机。此外,操作相机的人还应该调整角度,以确保照片得到整个范围。
接下来是对照片进行处理,创建一个重叠,从而创建一个3D网格。重叠需要重建,创建网格的人必须填补数据点之间的空隙。图像和角度越少,间隙越大,处理时间就越长。
虽然有其他的方法来创建3D模型,人们使用点云建模享受以下好处:
一种点云建模方法是否比另一种方法更有效?就准确率而言,两种方法的疗效相当。因此,选择任何一个选项都取决于您在项目中的需求以及实现其中一种技术的容易程度。
我们鼓励你订阅我们的每周通讯。订阅者还可以收到我们双月刊的电子版。
数字地表模型(DSM)是一种通用的摄影测量产品,在测绘和地理信息系统(GIS)领域得到了广泛的应用。与发明相符…

在过去的几年里,激光雷达系统已经成为快速收集高密度三维点云的领先技术。这些系统的出现降低了成本,也增加了成本。


